定位工装及从手组件定位方法与流程
本申请涉及一种定位工装及从手组件定位方法,属于医疗设备。
背景技术:
1、手术机器人的从手组件是用于执行手术操作的组件,器械盒的数量可设置多个,多个器械盒分别对应同类型的手术器械件,这样从手组件可进行多个手术动作,多个器械盒均可转动,使得从手组件可完成更为复杂手术操作。从手组件还具有穿刺筒,器械件通过穿刺筒进入病灶区域。
2、从手组件在装配时,多个器械盒需要绕器械盒的转动中心设置,且器械盒的转动中心与穿刺筒对齐。但受装配精度和零件精度影响,导致器械盒的转动中心难以与穿刺筒对齐,进而导致手术机器人器械件穿过穿刺筒有倾斜角度,器械盒旋转时,影响手术操作,增加手术风险。
技术实现思路
1、本申请提供一种定位工装及从手组件定位方法,解决了相关技术中手术机器人的从手组件末端的穿刺筒定位不便的问题。
2、第一方面,本申请提供一种定位工装,用于定位从手组件的穿刺筒,所述从手组件包括安装座、相对于安装座伸缩的伸缩臂、穿刺筒和多个器械盒,所述伸缩臂的自由端与所述穿刺筒连接,所述伸缩臂还配置为可相对所述安装座转动,多个所述器械盒绕预设轴线间隔设置,多个所述器械盒配置为可绕所述预设轴线转动,所述定位工装包括:
3、定位件,所述定位件配置为可沿所述预设轴线设置,且所述定位件穿过所述穿刺筒的中轴线,以使所述穿刺筒的中轴线位于所述预设轴线上。
4、本申请提供的定位工装所应用的从手组件中,伸缩臂与安装座可转动连接,使得伸缩臂与安装座之间的角度可调节,这样可改变与伸缩臂连接的穿刺筒的朝向。多个器械盒绕预设轴线转动,使得多个器械盒所绕设的中心位于预设轴线上。定位件位于预设轴线上,使得定位件沿预设轴线分布。定位件穿设于穿刺筒,且定位件位于穿刺筒的中轴线上,使得穿刺筒的中轴线位于预设轴线上,穿刺筒可与多个器械盒所绕设的中心对齐,从而达到对穿刺筒定位的目的,并使得穿刺筒的定位过程简单方便,且定位精度高。这样即使从手组件因装配精度问题而导致穿刺筒与多个器械盒所绕设的预设轴线无法对齐时,也可通过调节伸缩臂与安装座的角度,以使穿刺筒与多个器械盒所绕设的预设轴线无法对齐。
5、在一些实施方式中,所述定位件包括定位杆,所述定位杆具有第一端和第二端,所述第一端与所述安装座可拆卸且活动连接,所述定位杆的中轴线与所述预设轴线重合,所述第二端配置为可穿设于所述穿刺筒,且所述定位杆的中轴线位于所述穿刺筒的中轴线上,所述定位杆配置为可沿所述预设轴线往复移动。
6、保障在定位完成后,通过第一端与安装座的可拆卸连接,将第一端与安装座分离,使定位工装脱离从手组件。
7、在一些实施方式中,所述安装座上与所述预设轴线对应的位置开设有定位孔,所述第一端插接于所述定位孔内。
8、通过设置安装孔使得定位杆可更方便地固定于安装座上。
9、在一些实施方式中,所述定位工装还包括定位套,所述定位套可拆卸地设置于所述定位孔内,且所述定位套沿所述预设轴线设置,所述第一端穿设于所述定位套,第一端的外壁与所述定位套的内壁贴合。定位孔用于定位安装位置基点,定位套用于引导第一端和第二端的延伸方向,保障第一端和第二端的连接方向与预设轴线重合。
10、在一些实施方式中,所述定位套与所述安装座螺纹连接或卡扣连接。
11、螺纹连接与卡扣连接均可使定位套与安装座可靠连接。
12、在一些实施方式中,所述第二端的外壁与所述穿刺筒的内壁贴合。
13、定位杆的第二端与穿刺筒内壁贴合,使得定位杆的第二端与穿刺筒在穿刺筒的径向上相对固定,可以防止安装偏差,保障穿刺筒的中轴线与预设轴线重合。
14、在一些实施方式中,所述定位件包括激光器,所述激光器配置为发射沿所述预设轴线设置的激光线,所述激光线穿过所述穿刺筒且位于所述穿刺筒的中轴线上。
15、定位件采用激光器的形式使定位件安装时更加简便,激光器的激光发射方向与激光器本体的延伸方向一致,可以通过定位孔和定位套将激光器固定,保障激光器的激光发射线与预设轴线重合,调节伸缩臂角度使激光线从穿刺筒中轴线穿出。
16、第二方面,本申请提供一种从手组件定位方法,可应用于上文的定位工装中,该方法包括:
17、将定位件沿所述预设轴线设置;
18、调节伸缩臂角度以使所述定位件穿过穿刺筒,且所述定位件位于所述穿刺筒的中轴线上。
19、第三方面,本申请提供了一种从手组件定位方法,可应用于上文的定位工装中,该方法包括:
20、将定位杆的第一端与安装座活动连接,并保障所述定位杆的中轴线设置于预设轴线上,以使多个器械盒绕设于所述定位杆;
21、将穿刺筒套设于所述定位杆,调节伸缩臂角度以使所述定位杆的中轴线与所述穿刺筒的中轴线共线。
22、在一些实施方式中,在将所述穿刺筒套设于所述定位杆之后,还包括:
23、将所述定位杆沿所述预设轴线,且背离所述穿刺筒的方向移动,以使所述定位杆由所述穿刺筒内脱离;
24、将所述穿刺筒移动至与所述定位杆错位;
25、将所述定位杆的第一端与所述安装座分离。
26、本申请提出的从手组件定位方法中,将定位杆的第一端安装于安装座且将定位杆的中轴线设置于预设轴线上,通过调节伸缩臂相对安装座转动,以及使定位杆在预设轴线上移动,使得穿刺筒将定位杆套设定位杆,这样可使得穿刺筒的中轴线也位于预设轴线上,从而使得穿刺筒可与多个器械盒所绕设的中心对齐。
技术特征:
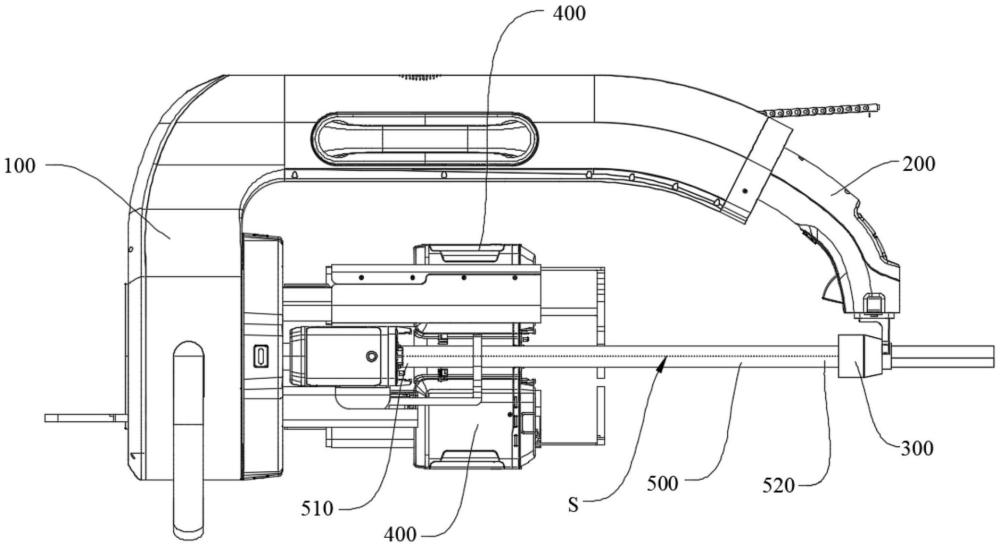
1.一种定位工装,用于定位从手组件的穿刺筒(300),所述从手组件包括安装座(100)、相对于安装座伸缩的伸缩臂(200)、穿刺筒(300)和多个器械盒(400),所述伸缩臂(200)的自由端与所述穿刺筒(300)连接,所述伸缩臂(200)还配置为可相对所述安装座(100)转动,多个所述器械盒(400)绕预设轴线间隔设置,多个所述器械盒(400)配置为可绕所述预设轴线转动,其特征在于,所述定位工装包括:
2.根据权利要求1所述的定位工装,其特征在于,所述定位件包括定位杆(500),所述定位杆(500)具有第一端(510)和第二端(520),所述第一端(510)与所述安装座(100)可拆卸且活动连接,所述定位杆(500)的中轴线与所述预设轴线重合,所述第二端(520)配置为可穿设于所述穿刺筒(300),且所述定位杆(500)的中轴线位于所述穿刺筒(300)的中轴线上,所述定位杆(500)配置为可沿所述预设轴线往复移动。
3.根据权利要求2所述的定位工装,其特征在于,所述安装座(100)上与所述预设轴线对应的位置开设有定位孔(110),所述第一端(510)插接于所述定位孔(110)内。
4.根据权利要求3所述的定位工装,其特征在于,所述定位工装还包括定位套(600),所述定位套(600)可拆卸地设置于所述定位孔(110)内,且所述定位套(600)沿所述预设轴线设置,所述第一端(510)穿设于所述定位套(600),第一端(510)的外壁与所述定位套(600)的内壁贴合。
5.根据权利要求4所述的定位工装,其特征在于,所述定位套(600)与所述安装座(100)螺纹连接或卡扣连接。
6.根据权利要求2所述的定位工装,其特征在于,所述第二端(520)的外壁与所述穿刺筒(300)的内壁贴合。
7.根据权利要求1所述的定位工装,其特征在于,所述定位件包括激光器,所述激光器配置为发射沿所述预设轴线设置的激光线,所述激光线穿过所述穿刺筒(300)且位于所述穿刺筒(300)的中轴线上。
8.一种从手组件定位方法,应用于如权利要求1-7中任一项所述的定位工装,其特征在于,包括:
9.一种从手组件定位方法,应用于如权利要求2-6中任一项所述的定位工装,其特征在于,包括:
10.根据权利要求9所述的从手组件定位方法,其特征在于,在将所述穿刺筒(300)套设于所述定位杆(500)之后,还包括:
技术总结
本申请提供一种定位工装及从手组件定位方法,涉及医疗设备技术领域。其中,定位装置可应用于从手组件中。从手组件的伸缩臂与安装座可转动连接,使得伸缩臂与安装座之间的角度可调节,这样可改变与伸缩臂连接的穿刺筒的朝向。定位件沿预设轴线设置,使得定位杆沿预设轴线分布。定位件穿设于穿刺筒,且定位件位于穿刺筒的中轴线上,使得穿刺筒的中轴线也位于预设轴线上,这样穿刺筒可与多个器械盒所环绕的中心对齐,从而达到对穿刺筒定位的目的,并使得穿刺筒的定位过程简单方便,且定位精度高。
技术研发人员:请求不公布姓名
受保护的技术使用者:杭州唯精医疗机器人有限公司
技术研发日:
技术公布日:2024/11/28
技术研发人员:请求不公布姓名
技术所有人:杭州唯精医疗机器人有限公司
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除