一种基于毫米波雷达的电动轮椅安全系统的制作方法
本发明涉及电动轮椅安全控制,具体涉及一种基于毫米波雷达的电动轮椅安全系统。
背景技术:
1、电动轮椅是在传统手动轮椅的基础上,叠加高性能动力驱动装置、智能操纵装置、电池等部件,改造升级而成的;具备人工操纵智能控制器,就能驱动轮椅完成前进、后退、转向、站立、平躺、等多种功能的新一代智能化轮椅,是现代精密机械、智能数控、工程力学等领域相结合的高新科技产品。
2、例如中国专利cn112315678b公开了一种电动轮椅行驶控制方法及系统,所述方法通过检测当前电动轮椅车速及使用者操作手柄的意图,根据目标车速和目标转弯半径,计算电动轮椅可能的横摆角速度,当可能横摆角速度超过提前预设值时,通过自动控制左、右驱动轮电机转速,控制实际横摆角速度不超过提前预设值,从而提升电动轮椅的操控稳定性,增加高速行驶时转向时的安全感,降低电动轮椅的倾翻风险。
3、但是,其技术存在以下问题,轮椅乘坐者在单人使用时由于后向存在视野盲区,并且由于乘坐者身体情况的特殊性,无法对环境进行观测并做出干预,存在较高的安全隐患。
4、基于此,本发明设计了一种基于毫米波雷达的电动轮椅安全系统以解决上述问题。
技术实现思路
1、针对现有技术所存在的上述缺点,本发明提供了一种基于毫米波雷达的电动轮椅安全系统。
2、为实现以上目的,本发明通过以下技术方案予以实现:
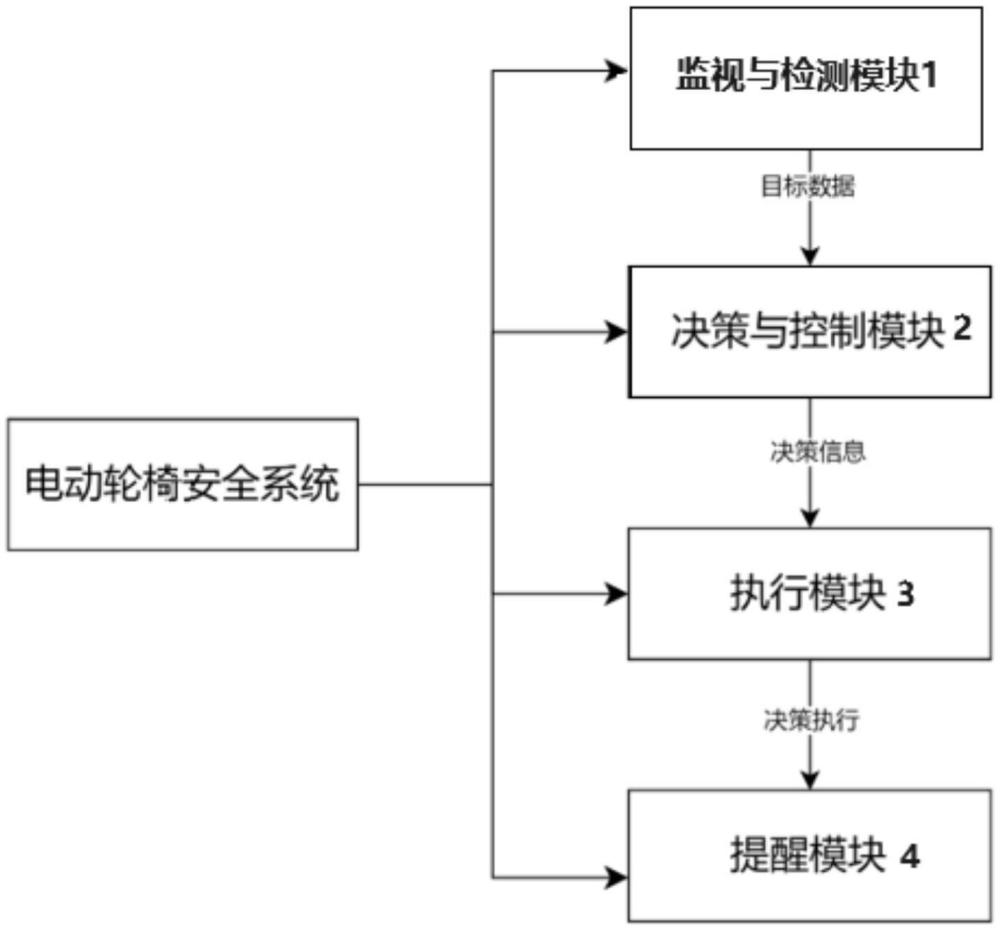
3、一种基于毫米波雷达的电动轮椅安全系统,包括监视与检测模块,所述监视与检测模块包括毫米波雷达传感器和处理器,毫米波雷达传感器与处理器电连接;
4、所述毫米波雷达传感器通过发射天线tx发送扫频信号,然后再由接收天线rx接收扫频信号经过目标反射回来的信号,并与扫频信号混频得到中频信号,通过模数转换后得到adc数据;
5、所述处理器对adc数据进行处理,得到频谱数据,然后再通过处理器内置的os-cfar检测器得到目标数据,再通过dbscan算法得到目标信息,再利用ekf跟踪滤波对目标信息进行分析得到航迹集;
6、决策与控制模块接收到处理器中获得的航迹集数据信息,然后对每个目标进行坐标转换,将极坐标转化为直角坐标,然后再根据直角坐标判断航迹集每个目标是否处于报警区域,报警区域分为左侧一类报警区域、右侧一类报警区域、左侧二类报警区域、右侧二类报警区域;然后决策与控制模块生成处于报警区域内的新的航迹集,对新的航迹集中的目标航迹进行速度判断,剔除掉速度不符合的目标航迹,再次生成一个新的航迹集,对新的航迹集进行报警功能判断,再输出报警状态信号,处理器与决策与控制模块电连接;
7、执行模块,用于接收决策与控制模块中所输出报警状态信号并控制提醒模块进行操作,执行模块与决策与控制模块电连接;
8、提醒模块包括后向报警指示灯、左侧提示器、左侧提示灯、右侧提示器、右侧提示灯,用于接收执行模块发出的报警状态执行信号并对安全轮椅的用户做出提醒,提醒模块与执行模块电连接。
9、更进一步的,所述毫米波雷达传感器通过发射天线tx发送fmcw波形的扫频信号;
10、毫米波雷达传感器31的接收天线rx接收由fmcw波形的扫频信号经过目标反射回来的信号,并与fmcw波形的扫频信号混频得到if中频信号,通过模数转换后得到adc数据。
11、更进一步的,所述处理器对adc数据进行1dfft和2dff,得到if中频信号的1d频谱与2d频谱,从而得到距离和速度信息,并基于1d与2d的频谱数据进行os-cfar检测,os-cfar检测用于检测目标信号的位置,然后得到目标的点云集合p={p1,p2,p3,…,},点云pn包括方位、距离、速度;
12、利用dbscan算法对上一步得到的点云数据p进行聚类,得到目标数据t={t1,t2,…,},目标tn包含目标方位、距离、速度;
13、基于得到的目标数据t={t1,t2,…,},对目标数据集中的每个目标分别进行ekf跟踪滤波与数据关联,得到上述目标的具体位置信息,得到目标航迹集tr(n-1)={tr1,tr2,…,};
14、根据上一个周期的航迹集tr(n-1)={tr1,tr2,…,},更新航迹集tr(n)={tr1,tr2,…,},并进行缓存,其中每一个目标tr包括方位、距离、速度。
15、更进一步的,所述决策与控制模块对处理器中获得的航迹集tr(n)={tr1,tr2,…,}的每个目标进行坐标转换,将极坐标变化为直角坐标,转换公式为:
16、x=range*s in(angle);
17、y=range*cos(angle);
18、其中,range为距离,angle为方位。
19、更进一步的,当目标tr的坐标值(x,y)满足以下条件之一时,目标不属于报警区域,剔除不属于报警区域的航迹:
20、xmax<x;
21、xmin>x;
22、ymax<y;
23、y<0;
24、其中,xmax表示在x轴上报警区域内的最大值;
25、xmin在x轴上报警区域内的最小值;
26、ymax表示在y轴上报警区域内的最大值。
27、更进一步的,报警功能判断的方法为:判断目标航迹处于哪一个报警区域,并计算报警区域中所有有效航迹的预警时间tc,根据报警区域内的所有有效航迹按照tc时间,进行报警状态判断;报警区域中所有有效航迹的预警时间tc的计算公式为tc=range/vel;
28、其中,vel为速度。
29、更进一步的,对筛选出来的目标航迹进行速度判断,当目标航迹速度等于0时,剔除掉该目标航迹,得到新的航迹集tv(n)={tv1,tv2,…,}
30、根据tv(n)中所有有效航迹,在直角坐标系中基于航迹方位信息(x,y)判断航迹所在报警区域,原点为安全轮椅所在处;
31、当y<ym且0<x<xmax时,该有效航迹处于右侧一类报警区域;
32、当y<ym且xmin<x<0时,该有效航迹处于左侧一类报警区域;
33、当ym<y<ymax且0<x<xmax时,该有效航迹处于右侧二类报警区域;
34、当ym<y<ymax且xmin<x<0时,该有效航迹处于左侧二类报警区域;
35、其中,ym表示在y轴上一类报警区域内的最大值。
36、更进一步的,报警区域内的所有有效航迹按照tc时间的大小进行排序,并进行报警状态判断:
37、当左侧一类报警区域存在有效航迹,选取tc最小的值,当tc<时间维度一等报警门限且vel>速度维度一等报警门限,判断出现左侧一级报警;
38、当tc<=时间维度一等报警门限且vel<=速度维度一等报警门限,判断出现左侧二级预警,其余情况不进行处理;
39、当右侧一类报警区域存在有效航迹,选取tc最小的值,当tc<时间维度一等报警门限且vel>速度维度一等报警门限,判断出现右侧一级报警;
40、当tc<=时间维度一等报警门限且vel<=速度维度一等报警门限,判断出现右侧二级预警,其余情况不进行处理;
41、当左侧二类报警区域存在有效航迹,选取tc最小的值,当tc<时间维度二等报警门限且vel>速度维度二等报警门限,判断出现左侧一级报警;
42、当tc<=时间维度二等报警门限且vel<=速度维度二等报警门限,判断出现左侧二级预警,其余情况不进行处理;
43、当右侧一类报警区域存在有效航迹,选取tc最小的值,当tc<时间维度二等报警门限且vel>速度维度二等报警门限,判断出现右侧一级报警;
44、当tc<=时间维度二等报警门限且vel<=速度维度二等报警门限,判断出现右侧二级预警,其余情况不进行处理;
45、基于上述所有判断结果控制报警状态输出,当左侧一类报警区域、左侧二类报警区域同时存在一级和二级报警时,输出一级报警;
46、当右侧一类报警区域、右侧二类报警区域同时存在一级和二级报警时,输出一级报警;
47、当左侧一类报警区域、左侧二类报警区域、右侧一类报警区域、右侧二类报警区域存在一级或二级报警时,输出对应的报警信号。
48、更进一步的,当执行模块获取到报警状态输出时,根据报警信号进行执行操作,具体实施细则为:
49、左侧一级报警信号执行,发送信号指示后向指示灯高闪,同时发送信号驾驶员左侧安全提示器震动或提示灯闪烁;
50、右侧一级报警信号执行,发送高闪信号指示后向指示灯高闪,同时发送信号驾驶员右侧安全提示器震动或提示灯闪烁;
51、左侧二级报警信号执行,发送快闪信号指示后向指示灯快闪;
52、右侧二级报警信号执行,发送快闪信号指示后向指示灯快闪。
53、更进一步的,提醒模块的提示操作为:
54、当后向报警指示灯收到高闪信号时,后向指示灯高闪;
55、当后向报警指示灯收到快闪信号时,后向指示灯快闪;
56、告知后向来车或人员前方有轮椅,请减速慢行;
57、当轮椅使用者左侧安全提示器接收到预警信号时执行震动和左侧提示灯闪烁,提示使用者有左侧来车;
58、当轮椅使用者右侧安全提示器接收到预警信号时执行震动和右侧提示灯闪烁,提醒使用者有右侧来车。
59、本发明相较于现有技术,其有益效果为:
60、本发明实现了通过毫米波雷达实现电动轮椅的安全预警,可以探测到电动轮椅在行驶时存在的安全风险,判断视野盲区内有无快速接近的后向来车,给安全座椅使用者提醒,同时告知后向来车前方有轮椅出行,减少安全风险,提升电动轮椅在单人使用时的安全性,减少在夜晚以及视线不佳时的碰撞发生。
技术研发人员:丁一,黄颖涵,江珊,蔡铭
技术所有人:复睿智行智能科技(上海)有限公司
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除