一种机械化茶园施肥灌溉系统及其控制方法与流程
本技术涉及机械化农业,更具体地说,本技术涉及一种机械化茶园施肥灌溉系统及其控制方法。
背景技术:
1、随着农业现代化进程的推进,传统的人工施肥和灌溉方式已无法满足规模化茶园的高效管理需求,机械化和智能化技术的引入,有助于提高农业生产效率,降低劳动强度,满足大规模生产的要求,茶园通常位于山区或丘陵地带,这些地区的水资源分布不均衡且管理难度较大,传统灌溉方式往往导致水资源浪费或肥料流失,影响茶叶产量和品质,机械化系统可以精准控制水肥用量,减少浪费,提高资源利用效率。
2、在机械化茶园施肥灌溉中,施肥灌溉机的流水步距固定,无法根据实际土壤湿润层深度和液肥损失等因素进行实时调整,从而可能会导致灌溉和施肥的不均匀,部分区域可能过度灌溉或施肥,而其它区域则可能水肥不足,从而影响茶树的均匀生长和茶叶的产量与品质,固定步距还可能导致水肥资源浪费,从而增加生产成本,并且无法适应茶园在不同茶叶生长期的外界环境中降雨或气温的波动,会进一步降低灌溉或施肥的效率,因此,如何实现对施肥灌溉机中流水步距的自适应调节,从而可提高施肥灌溉机的水肥利用率是业界面临的难题。
技术实现思路
1、本技术提供一种机械化茶园施肥灌溉系统及其控制方法,可综合评估各个茶叶生长期的湿润层深度和施肥灌溉机运输中的液肥损失实现对流水步距的自适应调节,从而可提高施肥灌溉机的水肥利用率。
2、第一方面,本技术提供一种机械化茶园施肥灌溉控制方法,包括:
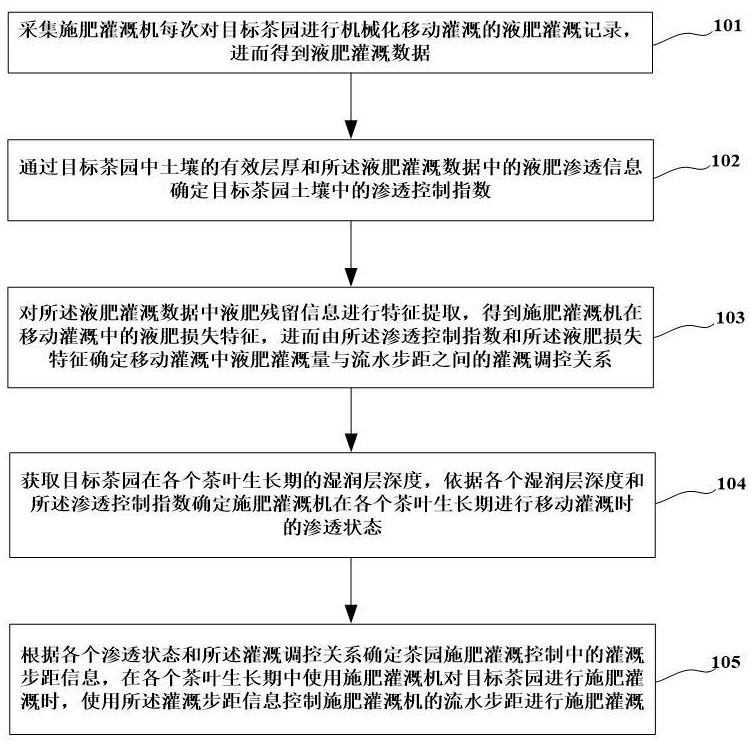
3、采集施肥灌溉机每次对目标茶园进行机械化移动灌溉的液肥灌溉记录,进而得到液肥灌溉数据;
4、通过目标茶园中土壤的有效层厚和所述液肥灌溉数据中的液肥渗透信息确定目标茶园土壤中的渗透控制指数;
5、对所述液肥灌溉数据中液肥残留信息进行特征提取,得到施肥灌溉机在移动灌溉中的液肥损失特征,进而由所述渗透控制指数和所述液肥损失特征确定移动灌溉中液肥灌溉量与流水步距之间的灌溉调控关系;
6、获取目标茶园在各个茶叶生长期的湿润层深度,依据各个湿润层深度和所述渗透控制指数确定施肥灌溉机在各个茶叶生长期进行移动灌溉时的渗透状态;
7、根据各个渗透状态和所述灌溉调控关系确定茶园施肥灌溉控制中的灌溉步距信息,在各个茶叶生长期中使用施肥灌溉机对目标茶园进行施肥灌溉时,使用所述灌溉步距信息控制施肥灌溉机的流水步距进行施肥灌溉。
8、在一些实施例中,通过目标茶园中土壤的有效层厚和所述液肥灌溉数据中的液肥渗透信息确定目标茶园土壤中的渗透控制指数具体包括:
9、对于各种水溶液肥,从所述液肥灌溉数据中获取水溶液肥的液肥渗透信息;
10、根据所述液肥渗透信息确定水溶液肥在各个土壤有效层中的渗透速率;
11、通过所有的渗透速率和目标茶园中土壤的有效层厚确定水溶液肥在目标茶园土壤中的渗透性,进而得到各种水溶液肥在目标茶园土壤中的渗透性;
12、依据所有的渗透性确定目标茶园土壤中的渗透控制指数。
13、在一些实施例中,对所述液肥灌溉数据中液肥残留信息进行特征提取,得到施肥灌溉机在移动灌溉中的液肥损失特征具体包括:
14、对于施肥灌溉机的每次机械化移动灌溉,从所述液肥灌溉数据中获取机械化移动灌溉时的液肥残留信息;
15、根据所述液肥残留信息确定机械化移动灌溉时施肥灌溉机的残留曲线;
16、从所述残留曲线中提取机械化移动灌溉时施肥灌溉机中的残留特征,进而得到每次机械化移动灌溉时施肥灌溉机中的残留特征;
17、基于所有的残留特征确定施肥灌溉机在移动灌溉中的液肥损失特征。
18、在一些实施例中,由所述渗透控制指数和所述液肥损失特征确定移动灌溉中液肥灌溉量与流水步距之间的灌溉调控关系具体包括:
19、确定施肥灌溉机在移动灌溉中的所有流水步距;
20、根据所述渗透控制指数确定水溶液肥在各个流水步距下的渗透深度;
21、通过各个渗透深度和所述液肥损失特征确定对应流水步距下的液肥灌溉量;
22、依据各个流水步距下的液肥灌溉量确定移动灌溉中液肥灌溉量与流水步距之间的灌溉调控关系。
23、在一些实施例中,依据各个湿润层深度和所述渗透控制指数确定施肥灌溉机在各个茶叶生长期进行移动灌溉时的渗透状态具体包括:
24、对于各个茶叶生长期,获取目标茶园在茶叶生长期的土壤含水率;
25、通过茶叶生长期的湿润层深度和所述土壤含水率确定施肥灌溉机在茶叶生长期的灌溉运输量;
26、根据所述灌溉运输量和施肥灌溉机的运输速率确定施肥灌溉机在茶叶生长期的运输时长;
27、依据所述运输时长和所述渗透控制指数确定确定施肥灌溉机在茶叶生长期进行移动灌溉时的渗透状态,进而得到施肥灌溉机在各个茶叶生长期进行移动灌溉时的渗透状态。
28、在一些实施例中,根据各个渗透状态和所述灌溉调控关系确定茶园施肥灌溉控制中的灌溉步距信息具体包括:
29、采集目标茶园在指定时间段内的土壤含水率,进而得到土壤含水曲线;
30、根据所述土壤含水曲线和各个渗透状态确定各个茶叶生长期的灌区轮换周期,进而确定各个灌区轮换周期下的液肥灌溉量;
31、通过所述灌溉调控关系和各个液肥灌溉量确定各个灌区轮换周期下的灌溉步距;
32、基于各个灌区轮换周期下的灌溉步距确定茶园施肥灌溉控制中的灌溉步距信息。
33、在一些实施例中,所述施肥灌溉机为水肥一体的机械化自动灌溉机。
34、第二方面,本技术提供一种机械化茶园施肥灌溉系统,包括:
35、采集模块,用于采集施肥灌溉机每次对目标茶园进行机械化移动灌溉的液肥灌溉记录,进而得到液肥灌溉数据;
36、处理模块,用于通过目标茶园中土壤的有效层厚和所述液肥灌溉数据中的液肥渗透信息确定目标茶园土壤中的渗透控制指数;
37、所述处理模块还用于对所述液肥灌溉数据中液肥残留信息进行特征提取,得到施肥灌溉机在移动灌溉中的液肥损失特征,进而由所述渗透控制指数和所述液肥损失特征确定移动灌溉中液肥灌溉量与流水步距之间的灌溉调控关系;
38、所述处理模块还用于获取目标茶园在各个茶叶生长期的湿润层深度,依据各个湿润层深度和所述渗透控制指数确定施肥灌溉机在各个茶叶生长期进行移动灌溉时的渗透状态;
39、执行模块,用于根据各个渗透状态和所述灌溉调控关系确定茶园施肥灌溉控制中的灌溉步距信息,在各个茶叶生长期中使用施肥灌溉机对目标茶园进行施肥灌溉时,使用所述灌溉步距信息控制施肥灌溉机的流水步距进行施肥灌溉。
40、第三方面,本技术提供一种计算机设备,所述计算机设备包括存储器和处理器,所述存储器用于存储计算机程序,所述处理器用于从所述存储器中调用并运行所述计算机程序,使得所述计算机设备执行上述的机械化茶园施肥灌溉控制方法。
41、第四方面,本技术提供一种计算机可读存储介质,所述计算机可读存储介质中存储有指令或代码,当指令或代码在计算机上运行时,使得计算机执行时实现上述的机械化茶园施肥灌溉控制方法。
42、本技术公开的实施例提供的技术方案具有以下有益效果:
43、本技术提供的一种机械化茶园施肥灌溉系统及其控制方法中,采集施肥灌溉机每次对目标茶园进行机械化移动灌溉的液肥灌溉记录,进而得到液肥灌溉数据;通过目标茶园中土壤的有效层厚和所述液肥灌溉数据中的液肥渗透信息确定目标茶园土壤中的渗透控制指数;对所述液肥灌溉数据中液肥残留信息进行特征提取,得到施肥灌溉机在移动灌溉中的液肥损失特征,进而由所述渗透控制指数和所述液肥损失特征确定移动灌溉中液肥灌溉量与流水步距之间的灌溉调控关系;获取目标茶园在各个茶叶生长期的湿润层深度,依据各个湿润层深度和所述渗透控制指数确定施肥灌溉机在各个茶叶生长期进行移动灌溉时的渗透状态;根据各个渗透状态和所述灌溉调控关系确定茶园施肥灌溉控制中的灌溉步距信息,在各个茶叶生长期中使用施肥灌溉机对目标茶园进行施肥灌溉时,使用所述灌溉步距信息控制施肥灌溉机的流水步距进行施肥灌溉。
44、由此可见,本技术中,可根据各个渗透状态和灌溉调控关系确定茶园施肥灌溉控制中的灌溉步距信息,在各个茶叶生长期中使用施肥灌溉机对目标茶园进行施肥灌溉时,使用所述灌溉步距信息控制施肥灌溉机的流水步距进行施肥灌溉;首先,确定灌溉调控关系即可得到液肥灌溉量与流水步距的匹配关系,便于后续根据灌溉量对施肥灌溉机的灌溉步距的精准调控,实现液肥的均匀分布,避免液肥的浪费,从而可提高施肥灌溉机的水肥利用效率,其中,特征提取能够识别出液肥在运输和施用过程中的损失特征,从而可便于确定液肥灌溉量与流水步距之间更准确的灌溉调控关系,确定渗透控制指数即可得到量化液肥在土壤中渗透特性的指标,便于通过渗透控制指数调整液肥灌溉量和灌溉位置,以确保液肥能够有效地到达茶树的根系,提高施肥灌溉机对液肥的水肥利用率;其次,确定各个茶叶生长期中液肥的渗透状态即可得到各个生长期的土壤渗透情况,从而能够精准判断土壤对液肥的吸收情况,使灌溉步距与实际需水情况匹配,提高施肥效率,便于后续结合各个茶叶生长期的湿润层深度对流水步距进行调节,从而进一步提高茶园中的水肥利用率;综上所述,基于上述方案可综合评估各个茶叶生长期的湿润层深度和施肥灌溉机运输中的液肥损失实现对流水步距的自适应调节,从而可提高施肥灌溉机的水肥利用率。
技术研发人员:陈永烽,黎厚健,韦伟涛,陈玉萍,钟镇名,钟柳,黄雄志
技术所有人:梧州市竹茗茶业有限公司
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除