基于柔性足底薄膜的内镜控制方法、装置、内镜设备及可读存储介质
本发明涉及器械控制,具体涉及基于柔性足底薄膜的内镜控制方法、装置、内镜设备及可读存储介质。
背景技术:
1、内镜用户采集图像时由于双手需要对患者进行体态变换和检查探头移位等操作,所以当用户需要内镜采集图像、送水冲洗或送气时,往往通过脚踩不同的有线脚踏进行控制。
2、然而,这种控制方法存在多种弊端。首先用户为患者做内镜检查时一般全神贯注地看着内镜检查图像,当需要送水冲洗、采图或录像操作时就要低头找准有线脚踏的位置才能踩下,而且不同操作需要脚踩不同的有线脚踏,加大了用户操作的不便性;而且,有线脚踏在地面上的引线既对用户转移床位造成干扰,又容易感染细菌。
技术实现思路
1、鉴于上述问题,本发明实施例提供了基于柔性足底薄膜的内镜控制方法、装置、内镜设备及可读存储介质,解决了现有的当需要送水冲洗、采图或录像操作时就要低头找准有线脚踏的位置才能踩下,而且不同操作需要脚踩不同的有线脚踏,加大了用户操作的不便性的问题。
2、根据本发明实施例的一个方面,提供了一种基于柔性足底薄膜的内镜控制方法,所述方法包括:
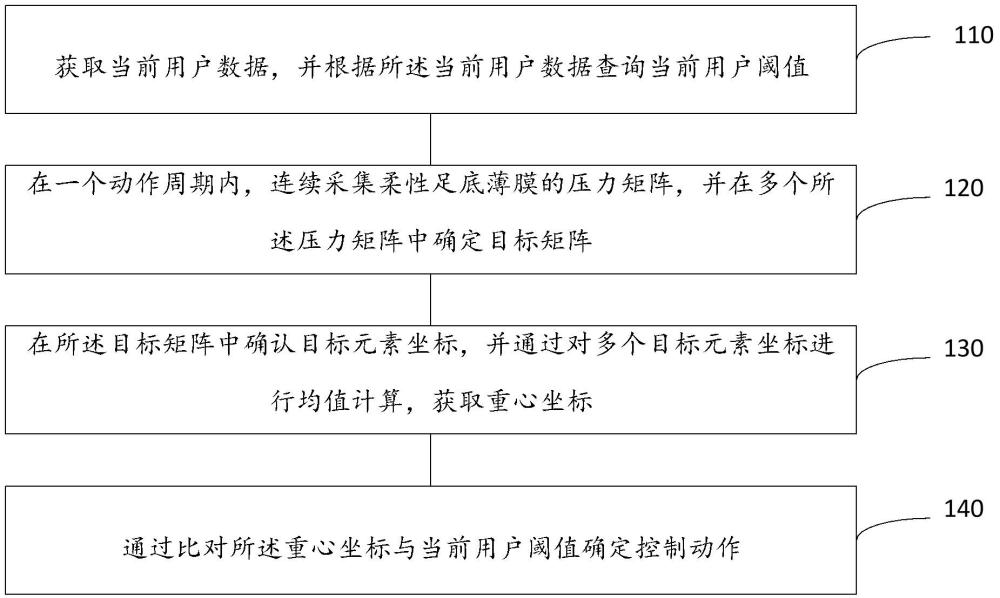
3、获取当前用户数据,并根据所述当前用户数据查询当前用户阈值;
4、在一个动作周期内,连续采集柔性足底薄膜的压力矩阵,并在多个所述压力矩阵中确定目标矩阵;
5、在所述目标矩阵中确认目标元素坐标,并通过对多个目标元素坐标进行均值计算,获取重心坐标;
6、通过比对所述重心坐标与当前用户阈值确定控制动作。
7、在一些可选的方式中,所述获取当前用户数据,并根据所述当前用户数据查询当前用户阈值,具体包括:
8、通过输入用户id,获得当前用户数据,并根据当前用户数据在预设的用户数据模型中获得当前用户阈值。
9、在一些可选的方式中,所述用户数据模型通过以下步骤获取:
10、创建当前用户id;
11、通过次脚尖踩下柔性足底薄膜,获得个脚尖矩阵,并对每个脚尖矩阵求重心坐标,通过获取重心坐标中的纵坐标最大值,并将作为脚尖踩阈值;
12、通过次脚跟踩下柔性足底薄膜,获得个脚跟矩阵,并对每个脚跟矩阵求重心坐标,通过获取重心坐标中的纵坐标最小值,并将作为脚跟踩阈值;
13、通过次脚左踩下柔性足底薄膜,获得个脚左矩阵,并对每个脚左矩阵求重心坐标,通过获取重心坐标中的横坐标最大值,并将作为左侧踩阈值;
14、通过次脚右踩下柔性足底薄膜,获得个脚右矩阵,并对每个脚右矩阵求重心坐标,通过获取重心坐标中的横坐标最小值,并将作为右侧踩阈值;
15、其中,所述当前用户阈值包括脚尖踩阈值、脚跟踩阈值、左侧踩阈值、右侧踩阈值。
16、在一些可选的方式中,所述动作周期为压力矩阵大于等于预设阈值开始,直至压力矩阵小于预设阈值结束;所述连续采集柔性足底薄膜的压力矩阵,并在多个所述压力矩阵中确定目标矩阵,具体包括:
17、将柔性足底薄膜中压力传感器根据分布情况建立平面直角坐标系;
18、在一个动作周期中,采集次柔性足底薄膜中压力传感器的压力值,并获得个压力矩阵p;
19、对每个压力矩阵的元素坐标进行压力值大小排序,并选取前n个压力值较大的元素坐标进行求和,获得每个压力矩阵的压力总值,其中,压力总值计算公式为:,是第个压力矩阵的压力总值,是第个压力矩阵的元素坐标中第大的元素压力值;
20、选取压力总值最大的压力矩阵为目标矩阵。
21、在一些可选的方式中,在所述目标矩阵中确认目标元素坐标,并通过对多个目标元素坐标进行均值计算,获取重心坐标,具体包括:
22、对所述目标矩阵的元素坐标进行压力值大小排序,并选取前n个压力值较大的元素坐标,作为计算坐标;
23、通过对n个所述计算坐标进行求平均,获得重心坐标(,),其中,,,(,)为前i个压力值的计算坐标。
24、在一些可选的方式中,通过比对所述重心坐标与当前用户阈值确定控制动作,具体包括:
25、将重心坐标(,)中的纵坐标与当前用户阈值中的脚尖踩阈值、脚跟踩阈值比对,当时,控制动作为脚尖踩动作;当,控制动作为脚跟踩动作;
26、当时,将重心坐标(,)中的横坐标与当前用户阈值中的左侧踩阈值、右侧踩阈值比对,当时,控制动作为左侧踩动作;当时,控制动作为右侧踩动作;
27、当且时,控制动作为无效动作。
28、根据本发明实施例的另一方面,提供了一种基于柔性足底薄膜的内镜控制装置,所述装置包括:
29、用户识别模块,用于获取当前用户数据,并根据所述当前用户数据查询当前用户阈值;
30、目标矩阵获取模块,用于在一个动作周期内,连续采集柔性足底薄膜的压力矩阵,并在多个所述压力矩阵中确定目标矩阵;
31、重心坐标确定模块,用于在所述目标矩阵中确认目标元素坐标,并通过对多个目标元素坐标进行均值计算,获取重心坐标;
32、控制动作判断模块,用于通过比对所述重心坐标与当前用户阈值确定控制动作。
33、根据本发明实施例的另一方面,提供了一种内镜设备,包括:处理器、存储器、通信接口、柔性足底薄膜和通信总线,所述处理器、所述存储器和所述通信接口通过所述通信总线完成相互间的通信,所述柔性足底薄膜与通信接口连接;
34、所述存储器用于存放至少一可执行指令,所述可执行指令使所述处理器执行如上述的基于柔性足底薄膜的内镜控制方法的操作。
35、在一些可选的方式中,所述内镜设备还包括发电装置、电源装置,所述发电装置与电源装置连接,所述电源装置通过电源线与处理器、存储器、柔性足底薄膜连接;
36、其中,所述发电装置包括顶板、底板、弹性件、主齿轮、从齿轮、锯条、导线,所述顶板设置在所述柔性足底薄膜下表面,所述顶板通过弹性件与底板活动连接,所述底板上设置有两个齿轮座,所述主齿轮、从齿轮分别转动设置在两个齿轮座上,所述导线两端分别连接在主齿轮、从齿轮内侧;所述锯条一端固定在顶板上,且锯条上的锯齿与所述主齿轮和/或从齿轮啮合连接;
37、所述顶板上设置有第一磁极,所述底板设置有第二磁极;且柔性足底薄膜受力时,所述顶板下压通过锯条带动导线转动,使导线在第一磁极和第二磁极之间做切割磁感线运动,且导线与电源装置连接并产生电能存储到电源装置中。
38、根据本发明实施例的另一方面,提供了一种可读存储介质,其特征在于,所述可读存储介质中存储有至少一可执行指令,所述可执行指令在如上述的内镜设备上运行时,使得内镜设备执行如上述的基于柔性足底薄膜的内镜控制方法的操作。
39、本发明实施例提供了基于柔性足底薄膜的内镜控制方法、装置、内镜设备及可读存储介质,其有益效果在于:本发明通过获取当前用户数据,并根据所述当前用户数据查询当前用户阈值;在一个动作周期内,连续采集柔性足底薄膜的压力矩阵,并在多个所述压力矩阵中确定目标矩阵;在所述目标矩阵中确认目标元素坐标,并通过对多个目标元素坐标进行均值计算,获取重心坐标;通过比对所述重心坐标与当前用户阈值确定控制动作。
40、用户在柔性足底薄膜做不同的脚踩动作,柔性足底薄膜检测用户的足底压力分布数据,并提出一种脚踩动作分类器对足底压力分布数据实现快速分类,最终根据分类结果对相应的内镜装置发送无线信号,控制对应内镜装置的开关,从而实现用户通过不同的脚踩动作统一控制不同的内镜装置。相比现有的内镜检查控制方法,本发明免去了现有的不同内镜装置的脚踏开关,避免了地面存在引线带来的弊端,给内镜医生带来便利性;同时本专利还提出了一种脚踩发电的装置和方法,免去医生对装置频繁充电的工作。
41、上述说明仅是本发明实施例技术方案的概述,为了能够更清楚了解本发明实施例的技术手段,而可依照说明书的内容予以实施,并且为了让本发明实施例的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
技术研发人员:黎建军,申志航,陈浩华,苏亚男,李超峰,贺龙君,刘朋,杨莹
技术所有人:中山大学肿瘤防治中心(中山大学附属肿瘤医院、中山大学肿瘤研究所)
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除