一种全自动移动穴盘式柿子椒苗移栽种植一体机
本发明涉及柿子椒苗移栽种植,具体为一种全自动移动穴盘式柿子椒苗移栽种植一体机。
背景技术:
1、如今国内存在的全自动化移栽种植机械几乎为零,大部分雇佣人工去移栽还有极少数是利用机械,这些机械种植是先将穴盘通过人工搬运至机械上,通过机械爪直接抓取根处的土壤,其一是增加了人工成本,其二是效率极慢且极容易伤害苗根,且种植间隔不定。这时我们就需要利用特殊的移栽流程和机械快速播种柿子椒苗,并且让柿子椒苗保持相对距离以保证其吸收养分充足性,降低人工成本。
2、柿子椒,又称甜椒、灯笼椒,是一种常见的蔬菜,富含维生素c、维生素e、叶酸等营养物质。幼苗长到10厘米到15厘米左右时开始移栽,幼苗的叶片通常呈浅绿色,形状可能是椭圆形或心形,边缘可能略带锯齿,茎通常比较纤细,呈浅绿色或黄绿色,幼苗在适宜的条件下会保持挺拔,移栽时的土壤湿度保持在60%至80%的范围内。温度应在15-25℃之间。
3、为克服现有播种柿子椒移栽技术和方案的不足,保障柿子椒苗的根茎的完整性,和移栽时的土壤湿度,提高存活率,降低人工成本,将移栽柿子椒苗的方式、机械与自动化进行适度结合并创新,进一步提高自动化移栽柿子椒苗的效率,以及确保柿子椒苗发育的良好性,降低人工种植成本。为此我们提出了一种全自动移动穴盘式柿子椒苗移栽种植一体机来解决上述问题。
技术实现思路
1、本发明的目的在于提供一种全自动移动穴盘式柿子椒苗移栽种植一体机,以解决上述背景技术中提出的无法保障柿子椒苗的根茎的完整性,和移栽时的土壤湿度,提高存活率,自动化移栽柿子椒苗的效率,降低人工种植成本的问题。
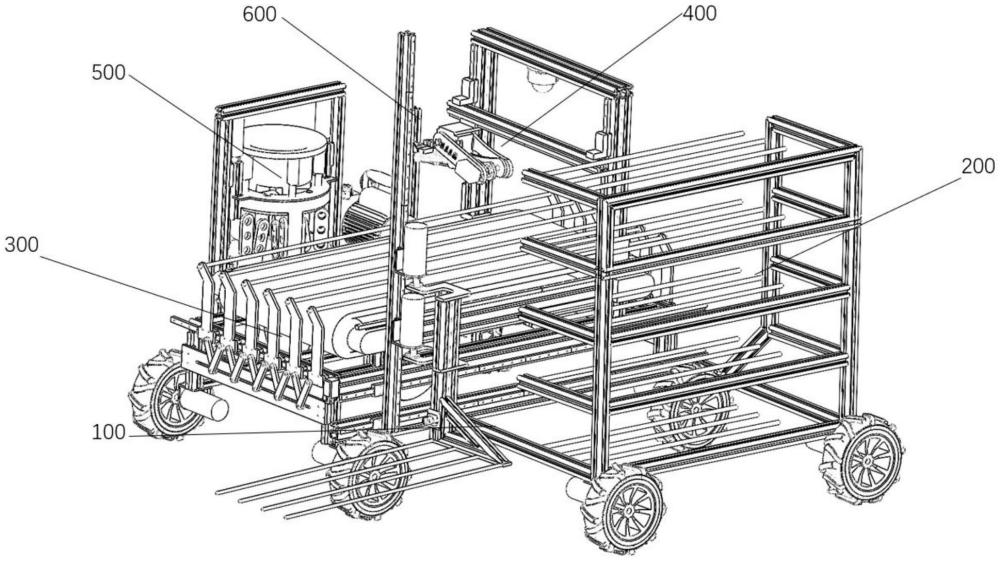
2、为实现上述目的,本发明提供如下技术方案:一种全自动移动穴盘式柿子椒苗移栽种植一体机,包括小车、机器视觉模块、穴盘搬运模块、穴盘储存模块、穴盘脱苗模块、取苗模块、种植模块、拢土浇灌模块;
3、所述机器视觉模块包括:相机,镜头,计算机,控制系统组成;相机用于捕捉图像,镜头来调整图像的焦距和视觉;
4、所述小车的左前端设置有穴盘搬运模块,所述小车的左端设置有穴盘储存模块,所述小车的内部设置有穴盘脱苗模块,所述小车的顶部设置有取苗模块,所述小车的右端设置有种植模块,所述小车的右端位于种植模块的后侧设置有拢土浇灌模块;
5、所述穴盘搬运模块包括:前端摄像头、抬盘臂、上下升降线轨、前后移动线轨和旋转电机,所述前端摄像头搭载在抬盘臂上,所述抬盘臂安装在旋转电机上,所述旋转电机搭载在上下升降线轨内,所述上下升降线轨搭载在前后移动线轨内,所述前后移动线轨位于小车的左端与小车固定连接;
6、所述穴盘储存模块包括:储盘架,铝型材架,支撑轮,所述小车的左侧连接有铝型材架,所述储盘架是等距固定在铝型材架内的,所述铝型材架的底部固定安装有两组支撑轮;
7、所述穴盘脱苗模块包括:挤压杆、固定片、往复电动推杆、挤压限定导轨、连杆定位片和传送带,所述小车的前后两端分别连接有连杆定位片,所述连杆定位片内活动连接有挤压限定导轨,所述连杆定位片的外侧连接有往复电动推杆,所述挤压限定导轨的上端连接有固定片,所述固定片之间固定连接有挤压杆,所述挤压杆的底部位于小车内安装有传送带;
8、所述取苗模块包括:上端双目摄像头、龙门架和柔性机械抓手,所述小车的顶部位于传送带的两侧安装有龙门架,所述龙门架顶部的中心位置固定安装有上端双目摄像头,所述龙门架的前侧搭载柔性机械抓手;
9、所述种植模块包括:放苗口、破土爪、微型电动推杆、气体压缩机和气动推杆,所述小车的右端安装有放苗口,所述放苗口的下端安装有微型电动推杆,所述微型电动推杆的下端与连接件相连接,所述连接件的下端与气动推杆相连接,所述气动推杆的下端连接有破土爪,所述小车的右端位于微型电动推杆的后侧安装有气体压缩机;
10、所述拢土浇灌模块包括:水箱、底端双目摄像头和覆土滚轮,所述小车的右端位于气体压缩机的下侧安装有水箱,所述水箱的下端固定安装有底端双目摄像头,所述小车的右端位于水箱的后侧搭载有覆土滚轮。
11、优选的,所述破土爪包括不锈钢爪头、爪体和下压块,所述爪体的外侧与小车相连接,所述微型电动推杆的下端与下压块相连接,所述破土爪由四组爪体组成。
12、优选的,所述抬盘臂主要是由四根等距的钢柱和铝型材构成,所述旋转电机主要由两个减速电机控制抬盘臂的左右旋转。
13、优选的,所述挤压杆由六根钢柱构成,所述固定片主要将挤压杆与下方挤压限定导轨固定,两侧所述固定片对称。
14、优选的,所述放苗口呈漏口式,所述不锈钢爪头内置湿度检测装置,所述湿度检测装置与水箱电性连接,所述爪体内均匀分布五个微型电动推杆。
15、优选的,所述底端双目摄像头,安装在水箱底部,当识别有苗从下方经过时,控制水箱喷水,使土壤湿润达到生长湿度;同时使用sift算法记录苗的距离以控制间距。。
16、与现有技术相比,本发明的有益效果是:
17、本发明在大部分柿子椒种植过程中主要采用人工移栽,人工将用穴盘培育的柿子椒苗搬运至田间,最后通过人工进行移栽。有少部分机械通过人工搬运穴盘,利用机械爪直接对根茎处进行抓取,对苗根造成的损坏。本一体机可以实现完全自动化,且对苗根不造成损坏,利用连杆按压脱苗,极大的保证了苗根的完整性。一次可进行多盘穴盘的种植且抓取完的穴盘可收纳统一进行处理,可以显著提高种植效率和精度,减少人工劳动力的投入且提高了苗的存活率。
技术特征:
1.一种全自动移动穴盘式柿子椒苗移栽种植一体机,其特征在于:包括小车、机器视觉模块、穴盘搬运模块(100)、穴盘储存模块(200)、穴盘脱苗模块(300)、取苗模块(400)、种植模块(500)、拢土浇灌模块(600);
2.根据权利要求1所述的一种全自动移动穴盘式柿子椒苗移栽种植一体机,其特征在于:所述破土爪(520)包括不锈钢爪头(521)、爪体(522)和下压块(523),所述爪体(522)的外侧与小车相连接,所述微型电动推杆(530)的下端与下压块(523)相连接,所述破土爪(520)由四组爪体(522)组成。
3.根据权利要求1所述的一种全自动移动穴盘式柿子椒苗移栽种植一体机,其特征在于:所述抬盘臂(120)主要是由四根等距的钢柱和铝型材构成,所述旋转电机(150)主要由两个减速电机控制抬盘臂(120)的左右旋转。
4.根据权利要求1所述的一种全自动移动穴盘式柿子椒苗移栽种植一体机,其特征在于:所述挤压杆(310)由六根钢柱构成,所述固定片(320)主要将挤压杆(310)与下方挤压限定导轨(340)固定,两侧所述固定片(320)对称。
5.根据权利要求2所述的一种全自动移动穴盘式柿子椒苗移栽种植一体机,其特征在于:所述放苗口(510)呈漏口式,所述不锈钢爪头(521)内置湿度检测装置,所述湿度检测装置与水箱(610)电性连接,所述爪体(522)内均匀分布五个微型电动推杆(530)。
6.根据权利要求1所述的一种全自动移动穴盘式柿子椒苗移栽种植一体机,其特征在于:所述底端双目摄像头(620),安装在水箱(610)底部,当识别有苗从下方经过时,控制水箱(610)喷水,使土壤湿润达到生长湿度;同时使用sift算法记录苗的距离以控制间距。
技术总结
本发明涉及柿子椒苗移栽种植技术领域,具体为一种全自动移动穴盘式柿子椒苗移栽种植一体机,包括小车、机器视觉模块、穴盘搬运模块、穴盘储存模块、穴盘脱苗模块、取苗模块、种植模块、拢土浇灌模块。本发明在大部分柿子椒种植过程中主要采用人工移栽,人工将用穴盘培育的柿子椒苗搬运至田间,最后通过人工进行移栽。有少部分机械通过人工搬运穴盘,利用机械爪直接对根茎处进行抓取,对苗根造成的损坏。本一体机可以实现完全自动化,且对苗根不造成损坏,利用连杆按压脱苗,极大的保证了苗根的完整性。一次可进行多盘穴盘的种植且抓取完的穴盘可收纳统一进行处理,可以显著提高种植效率和精度,减少人工劳动力的投入且提高了苗的存活率。
技术研发人员:吴群彪,马楚沛,朱文景,孙莉雯,周子沐,朱祖宁,张金铮,蒋智磊,赵晓燕
受保护的技术使用者:江苏科技大学苏州理工学院
技术研发日:
技术公布日:2024/11/26
技术研发人员:吴群彪,马楚沛,朱文景,孙莉雯,周子沐,朱祖宁,张金铮,蒋智磊,赵晓燕
技术所有人:江苏科技大学苏州理工学院
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除