一种用于超声介入穿刺的穿刺系统及应用方法与流程
本发明涉及介入穿刺装置,更具体地说,涉及一种用于超声介入穿刺的穿刺系统及应用方法。
背景技术:
1、介入超声(interventional ultrasound)技术作为现代超声医学的一个分支,它是在超声显像基础上为进一步满足临床诊断和治疗的需要而发展起来的一门新技术;其主要特点是在实施时超声的监视或引导下,完成各种穿刺活检、x线造影以及抽吸、插管、注药治疗等操作,可以避免某些外科手术,达到与外科手术相当的效果。近年来,随着各种穿刺针具、导管、导向装置及超声仪器的不断改进与发展,介入超声在临床上得到越来越广泛的应用。
2、目前采用的介入超声设备进行手术时,为了保障精确度,通常医生会采用左手持超声探头,右手持穿刺针,以超声探头画面为依据并根据经验判断合适的进针位置以及进针角度,该种操作面临着两个难点:1、医生观测超声探头画面需要抬头或偏头看显示屏,此时医生视线会离开手部,容易存在手眼不协调导致的失误;2、穿刺时医生手肘缺乏支撑,在手持超声探头一定时间后,容易出现晃动直接影响超声探头画面(在一些耗时较长的手术中尤其突出),需要重新调整好后才可继续穿刺;这两个难点使得介入超声手术存在一定门槛,在行业内并没有可以解决上述两个难点的设备,只能是完全依赖医生的经验(经验来自于医生临床操作以及医生依赖训练工具的自我训练),而且由于画面存在不稳定等因素,手术时间往往都会超出预期时间,需要一种可以解决上述问题的用于超声介入穿刺的穿刺系统及应用方法,以填补行业空白。
技术实现思路
1、本发明要解决的技术问题在于,针对现有技术的上述缺陷,提供一种用于超声介入穿刺的穿刺系统,还提供了一种用于超声介入穿刺的穿刺系统应用方法。
2、本发明解决其技术问题所采用的技术方案是:
3、构造一种用于超声介入穿刺的穿刺系统,其中,包括固定架,所述固定架上设置有机械手,所述机械手的活动端固定有横向的玻璃板;所述玻璃板上设置有与待超声区域对应的通孔,所述通孔处穿设有超声探头,所述玻璃板上设置有对超声探头锁定的锁定单元和带动所述锁定单元上下浮动的浮动单元,所述超声探头上设置有控制所述锁定单元锁定和解锁的控制器;所述固定架上设置有接收所述超声探头信号并对应生成超声图像信号的控制主机,所述机械手的活动端固定有将超声图像信号投影至玻璃板上的hud投影仪;所述玻璃板上设置有对所述通孔加入耦合剂的耦合剂泵,所述通孔的下边缘设置有带弹性的充气密封圈,所述玻璃板通过所述充气密封圈压持患者待超声区域;所述充气密封圈上设置有检测其内部气压的第一压力传感器,所述超声探头的前端设置有检测所述超声探头压持人体压力的第二压力传感器,所述玻璃板上设置有处理模块;所述处理模块记录所述控制器触发时第二压力传感器读数作为初始压力值,依据所述第一压力传感器数据判断充气密封圈对人体压持力的大小,若超出设定范围,则控制机械手调整玻璃板位置进行压力补偿,同时若玻璃板出现移动,则控制浮动单元调整锁定单元相应浮动,使得第二压力传感器读数恢复至所述初始压力值。
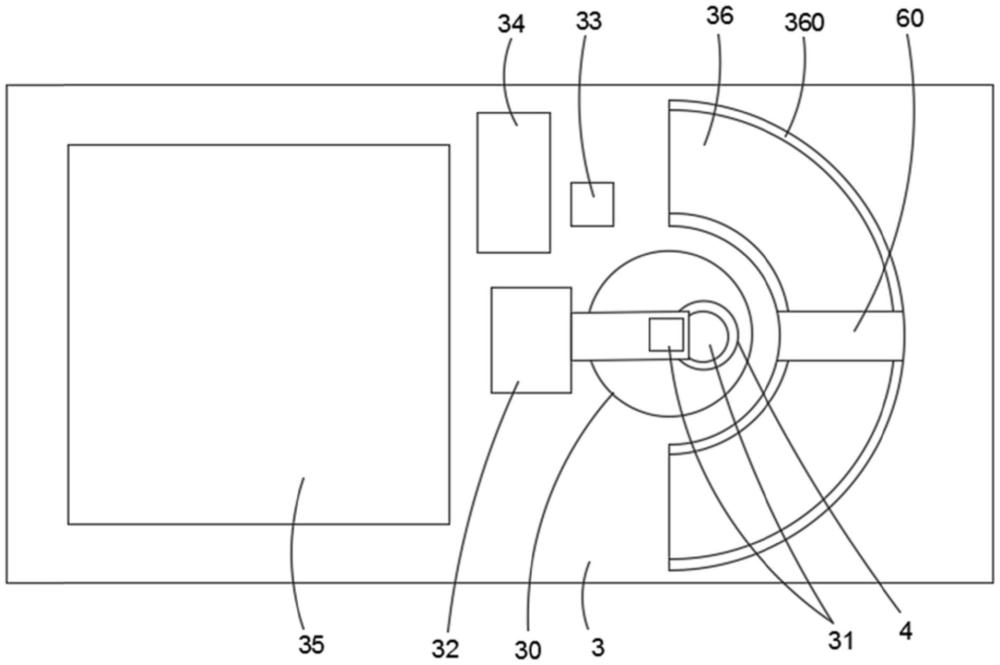
4、本发明所述的用于超声介入穿刺的穿刺系统,其中,所述机械手的活动端固定有立板,所述立板的下端固定有所述玻璃板,所述立板的上端固定有投影仪安装板,所述hud投影仪固定安装在所述投影仪安装板上;所述玻璃板上位于所述通孔的左侧设置有投影区域,所述玻璃板上位于所述通孔的右侧设置有呈半圆环型的穿刺通槽;所述hud投影仪与所述投影区域相正对。
5、本发明所述的用于超声介入穿刺的穿刺系统,其中,所述通孔位于所述穿刺通槽的半圆环型区域内部且通孔与穿刺通槽同心设置;所述玻璃板上设置有与所述穿刺通槽对应的连接穿刺针的穿刺支架;所述穿刺通槽的上端开口边缘设置有半圆环型的滑轨以及带动所述滑块在所述滑轨上移动的移动单元,所述穿刺支架包括滑动设置在所述滑轨上的滑块,所述滑块上设置有横移块以及调节所述横移块横移的横移单元,所述横移块横移时朝向或背离所述滑轨的半圆环型的圆心;所述横移块上设置有夹持穿刺针的夹具以及带动所述夹具纵向旋转的旋转电机。
6、本发明所述的用于超声介入穿刺的穿刺系统,其中,所述穿刺针包括针芯、为所述针芯导向的导向单元以及推动所述针芯的电动推杆;所述导向单元包括导向环安装板、两个导向环以及位于两个所述导向环之间的电控拨动叉,所述电控拨动叉用于拨动调节针芯的位置,所述针芯的杆部采用塑胶材质。
7、本发明所述的用于超声介入穿刺的穿刺系统,其中,所述锁定单元包括固定在超声探头的尾端的花键杆和套设在所述花键杆上的花键套,所述花键套上设置有驱动齿轮和对所述驱动齿轮的位置进行锁定和解锁的第一驱动电机,所述花键杆上沿长度方向设置有与所述驱动齿轮相啮合的条形齿槽。
8、本发明所述的用于超声介入穿刺的穿刺系统,其中,所述锁定单元还包括安装座,所述安装座上设置有纵向的旋转轴和对所述旋转轴的转动位置进行锁定和解锁的第二驱动电机,所述旋转轴的外侧表面与所述花键套的外侧表面固定连接;所述控制器用于控制所述第一驱动电机以及第二驱动电机进行同步解锁或锁死。
9、本发明所述的用于超声介入穿刺的穿刺系统,其中,所述浮动单元包括套筒和带动所述套筒纵向升降的升降电推杆,所述套筒上设置有滑动连接所述安装座的滑动槽和为所述安装座复位的复位弹簧。
10、一种用于超声介入穿刺的穿刺系统应用方法,应用如上述的用于超声介入穿刺的穿刺系统,其中,所述方法包括步骤:
11、控制机械手带动玻璃板移动至患者待超声区域上方,并向下移动玻璃板,通过充气密封圈弹性压持患者待超声区域;
12、手持超声探头按压患者待超声区域进行超声探测,控制主机接收超声探头信号并对应生成超声图像信号,通过hud投影仪将超声图像信号转化为影像并投影至玻璃板上;
13、依据影像调整好超声探头的位置以及对患者待超声区域的按压力度,通过控制器控制锁定单元锁定超声探头;处理模块记录所述控制器触发时第二压力传感器读数作为初始压力值;完成超声探头的位置初始化;
14、进行穿刺操作时,依据第一压力传感器数据判断充气密封圈对人体压持力的大小,若超出设定范围,则控制机械手调整玻璃板位置进行压力补偿,同时若玻璃板出现移动,则控制浮动单元调整锁定单元相应浮动,使得第二压力传感器读数恢复至初始压力值。
15、本发明的有益效果在于:控制机械手带动玻璃板移动至患者待超声区域上方,并向下移动玻璃板,通过充气密封圈弹性压持患者待超声区域;手持超声探头按压患者待超声区域进行超声探测,控制主机接收超声探头信号并对应生成超声图像信号,通过hud投影仪将超声图像信号转化为影像并投影至玻璃板上;依据影像调整好超声探头的位置以及对患者待超声区域的按压力度,通过控制器控制锁定单元锁定超声探头;处理模块记录所述控制器触发时第二压力传感器读数作为初始压力值;完成超声探头的位置初始化;进行穿刺操作时,依据第一压力传感器数据判断充气密封圈对人体压持力的大小,若超出设定范围,则控制机械手调整玻璃板位置进行压力补偿,同时若玻璃板出现移动,则控制浮动单元调整锁定单元相应浮动,使得第二压力传感器读数恢复至初始压力值;
16、应用本技术的方式方法,通过玻璃板来提供一个平台,不仅便于医生操作时对手部进行支撑,也可以形成一个hud投影屏来将超声图像直接投影到操作视野范围内,此外,以玻璃板为基准,结合位于玻璃板上的充气密封圈、第一压力传感器、第二压力传感器、机械手以及处理模块构建一个压力自适应浮动调节系统,可以很好的维持对人体的压持力度,以及在人体出现移位情况下快速自适应调整超声探头的位置,无需医生进行手持超声探头,大幅提升画面稳定性和可靠性的同时,减少医生负担;充气密封圈弹性压持患者待超声区域的同时,还形成一个槽体区域以便于耦合剂泵加入耦合剂,便于上耦合剂的自动化操作。
技术研发人员:王向东,吴亚林,陈玲,舒成
技术所有人:深圳市盐田区人民医院
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除