一种器械输送方法、装置及存储介质与流程
本技术涉及医疗器械,更具体的说,涉及一种器械输送方法、装置及存储介质。
背景技术:
1、消化道、呼吸道等自然腔道是人类常见疾病好发部位,由于病灶处于人体自然腔道内部,因此需要通过内窥镜进行检查或手术治疗。
2、传统的内窥镜检查或手术,需要人双手配合持镜体、操作旋钮、手工输送镜体等动作完成操作过程;同时需要配合术中术式要求使用不同种类的器械,器械的使用繁琐,需要多人协同操作。
3、随着机器人辅助技术的发展,机器人和数字化技术在医院的应用愈显突出,可以通过对应的驱动机构为器械提供驱动力,实现对器械的输送。但是,目前的器械输送方法忽略驱动机构的阻尼的影响,导致对器械输送的控制存在偏差,器械输送的稳定性和可靠性较差。而且,无法预测工作孔道的弯曲状态,进一步导致器械输送的稳定性和可靠性较差。
技术实现思路
1、有鉴于此,本技术实施例公开一种器械输送方法、装置及存储介质,以提高器械输送的稳定性和可靠性。
2、本技术实施例提供的技术方案如下:
3、第一方面,本技术实施例提供了一种器械输送方法,所述方法包括:
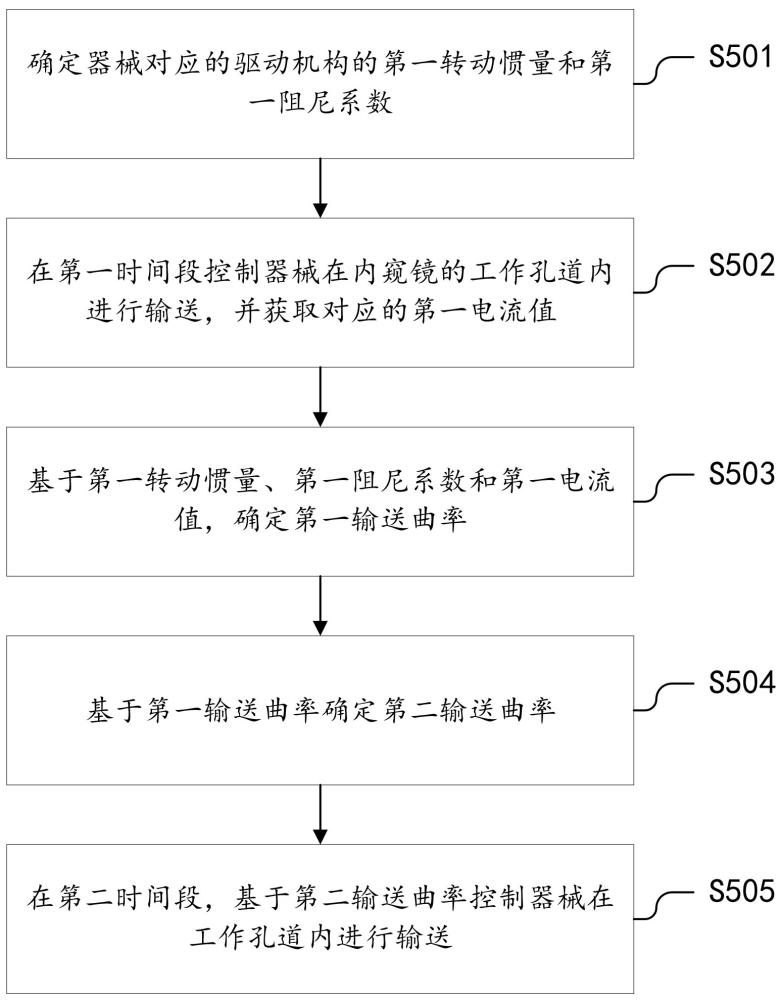
4、确定器械对应的驱动机构的第一转动惯量和第一阻尼系数;
5、在第一时间段控制所述器械在内窥镜的工作孔道内进行输送,并获取对应的第一电流值;
6、基于所述第一转动惯量、所述第一阻尼系数和所述第一电流值,确定第一输送曲率,所述第一输送曲率为所述器械在第一时间段对应的输送曲率;
7、基于第一输送曲率确定第二输送曲率,所述第二输送曲率为基于所述第一输送曲率对所述第一时间段之后的时间段进行输送曲率预测得到;
8、在第二时间段,基于所述第二输送曲率控制所述器械在所述工作孔道内进行输送。
9、在一种可能的实施方式中,所述确定器械对应的驱动机构的第一转动惯量和第一阻尼系数,包括:
10、控制所述驱动机构的回转体匀速转动,得到对应的第二阻尼系数;
11、控制所述回转体匀加速转动,得到对应的第二转动惯量;
12、对所述驱动机构对应的电机控制模型进行离散处理,得到离散处理后的电机控制模型;
13、基于所述离散处理后的电机控制模型构建目标函数,所述目标函数用于表征电流与转动惯量、阻尼系数之间的关系;
14、基于所述第二阻尼系数和所述第二转动惯量,利用阻尼牛顿法迭代求解所述目标函数,得到所述第一转动惯量和所述第一阻尼系数。
15、在一种可能的实施方式中,所述方法还包括:
16、获取第三时间段内所述驱动机构对应的第二电流值;
17、所述基于第二阻尼系数和第二转动惯量,利用阻尼牛顿法迭代求解所述目标函数,确定所述第一转动惯量和所述第一阻尼系数,包括:
18、利用所述第二阻尼系数和所述第二转动惯量,确定允许误差值;
19、基于所述允许误差值和所述第二电流值,利用阻尼牛顿法迭代求解所述目标函数,得到所述第一转动惯量和所述第一阻尼系数。
20、在一种可能的实施方式中,所述基于所述允许误差值和所述第二电流值,利用阻尼牛顿法迭代求解所述目标函数,得到所述第一转动惯量和所述第一阻尼系数,包括:
21、利用所述第二电流值对应的权值以及递推平均滤波法,对所述第二电流值进行处理,得到第三电流值;
22、基于所述允许误差值和所述第三电流值,利用阻尼牛顿法迭代求解所述目标函数,得到所述第一转动惯量和所述第一阻尼系数。
23、在一种可能的实施方式中,所述第一时间段包括多个输送周期,所述第一输送曲率为多个,所述第一电流值为多个;
24、所述基于所述第一转动惯量、所述第一阻尼系数和所述第一电流值,确定第一输送曲率,包括:
25、基于所述第一转动惯量、所述第一阻尼系数、摩擦模型和所述驱动机构对应的电机控制模型,确定曲率计算公式;
26、基于所述曲率计算公式和多个所述第一电流值,确定多个所述输送周期对应的多个所述第一输送曲率。
27、在一种可能的实施方式中,所述基于第一输送曲率确定第二输送曲率,包括:
28、基于多个所述第一输送曲率和多个所述第一输送曲率对应的输送位置,拟合得到曲率预测函数;
29、基于所述曲率预测函数确定第二输送曲率。
30、在一种可能的实施方式中,所述在第二时间段,基于所述第二输送曲率控制所述器械在所述工作孔道内进行输送,包括:
31、基于所述第二输送曲率和最大输送力限制值,确定第四电流值;
32、在第二时间段,基于所述第四电流值控制所述器械在所述工作孔道内进行输送。
33、在一种可能的实施方式中,所述方法还包括:
34、控制所述驱动机构的回转体匀速转动至第一位置,得到对应的第三阻尼系数、第一噪声值和第一摩擦力;
35、控制所述回转体匀速转动至第二位置,得到对应的第四阻尼系数、第二噪声值和第二摩擦力;
36、基于所述第三阻尼系数和所述第四阻尼系数,得到第一判断结果,所述第一判断结果用于表征所述回转体与机械传动件间的安装是否满足第一摩擦力条件;
37、基于所述第一噪声值、所述第二噪声值和噪声阈值,得到第二判断结果,所述第二判断结果用于表征所述回转体与所述机械传动件间的安装是否满足噪声条件;
38、基于所述第一摩擦力、所述第二摩擦力和摩擦阈值,得到第三判断结果,所述第三判断结果用于表征所述回转体与所述机械传动件间的安装是否满足第二摩擦力条件;
39、基于所述第一判断结果、所述第二判断结果和所述第三判断结果,确定所述回转体与所述机械传动件间的安装是否有效。
40、第二方面,本技术实施例提供了一种器械输送装置,所述装置包括:
41、确定模块,用于确定器械对应的驱动机构的第一转动惯量和第一阻尼系数;
42、获取模块,用于在第一时间段控制所述器械在内窥镜的工作孔道内进行输送,并获取对应的第一电流值;
43、确定模块,还用于基于所述第一转动惯量、所述第一阻尼系数和所述第一电流值,确定第一输送曲率,所述第一输送曲率为所述器械在第一时间段对应的输送曲率;
44、确定模块,还用于基于第一输送曲率确定第二输送曲率,所述第二输送曲率为基于所述第一输送曲率对所述第一时间段之后的时间段进行输送曲率预测得到;
45、控制模块,用于在第二时间段,基于所述第二输送曲率控制所述器械在所述工作孔道内进行输送。
46、该器械输送装置具有实现上述第一方面或第一方面中任一可能实施方式中的器械输送方法的功能。该功能可以通过硬件实现,也可以通过硬件执行相应的软件实现,该硬件或软件包括一个或多个与上述功能相对应的模块。
47、本方面所示的有益效果,与第一方面的有益效果相似,详见第一方面所示,此处不再赘述。
48、第三方面,本技术实施例提供了一种器械输送装置,包括:
49、存储器,用于存储指令;
50、处理器,用于执行所述存储器中的所述指令以执行以上第一方面任一项所述的器械输送方法。
51、第四方面,本技术实施例提供了一种计算机可读存储介质,包括指令,当其在计算机上运行时,使得计算机执行以上第一方面任一项所述的器械输送方法。
52、第五方面,本技术实施例提供一种计算机程序产品,所述计算机程序产品在终端设备上运行时,使得所述终端设备执行以上第一方面任一项所述的器械输送方法。
53、第六方面,本技术提供了一种芯片系统,该芯片系统包括处理器,用于支持设备实现上述方面中所涉及的功能,例如,发送或处理上述方法中所涉及的数据和/或信息。在一种可能的设计中,所述芯片系统还包括存储器,存储器,用于保存设备必要的程序指令和数据。该芯片系统,可以由芯片构成,也可以包括芯片和其他分立器件。
54、第七方面,本技术实施例提供一种芯片,包括一个或多个接口电路和一个或多个处理器;接口电路用于从电子设备的存储器接收信号,并向处理器发送信号,信号包括存储器中存储的计算机指令;当处理器执行计算机指令时,使得电子设备执行第一方面或第一方面中任一可选实施方式中的器械传输方法。
55、基于上述技术方案,本技术具有以下有益效果:
56、本技术实施例公开了一种器械输送方法、装置及存储介质。其中,该方法包括:确定器械对应的驱动机构的第一转动惯量和第一阻尼系数;在第一时间段控制器械在内窥镜的工作孔道内进行输送,并获取对应的第一电流值;基于第一转动惯量、第一阻尼系数和第一电流值,确定第一输送曲率;基于第一输送曲率确定第二输送曲率;在第二时间段,基于第二输送曲率控制器械在工作孔道内进行输送。可见,本技术实施例中通过转动惯量、阻尼系数和电流值预测之后时间段的输送曲率,如此通过预测器械的输送曲率,实现了对工作孔道的弯曲状态的预测,之后基于预测得到的输送曲率控制器械继续输送,如此是结合了驱动机构的阻尼和工作孔道的弯曲状态,共同控制器械继续输送,能提高器械输送的稳定性和可靠性。
技术研发人员:江维,江国豪,张芳敏
技术所有人:北京云力境安科技有限公司
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除