多自由度驱动转接机构、驱动机构、器械钳及手术机器人的制作方法
本发明属于医疗器械,尤其涉及一种多自由度驱动转接机构、驱动机构、器械钳及手术机器人。
背景技术:
1、在手术医疗器械中,驱动转接机构是连接动力设备与手术执行设备的部分的中间件,其一般与手术执行设备设置为一个整体;当手术执行设备需要多自由度时,对应的需要结构复杂的驱动转接机构与手术执行设备相匹配。
2、发明人发现,在手术执行设备的多自由度发展前景下,需要多根钢丝的配合来驱动具体执行部件的夹取、转动及弯曲等动作;然而,数量较多的钢丝不但会增加结构的复杂度,还会增加控制的难度;这就需要尽量减少对钢丝的使用数量,其中一种思路为减少可实现的自由度,而自由度的减少,会影响手术执行设备的整体灵活性,不利于手术;还有一种思路是利用同一根钢丝实现多种驱动动作的需求,而这种方式会存在不同动作间的相互干扰问题,不利于手术的顺利进行,并且也不存在使得同一根钢丝执行多种动作的驱动机构。
技术实现思路
1、本发明为了解决上述问题,提出了一种多自由度驱动转接机构、驱动机构、器械钳及手术机器人,通过驱动转接机构,使得同一根钢丝在不同驱动设备的作用下,可以完成不同的驱动动作,且不同动作间不存在驱动干扰问题。
2、为了实现上述目的,第一方面,本发明提供了一种多自由度驱动转接机构,采用如下技术方案:
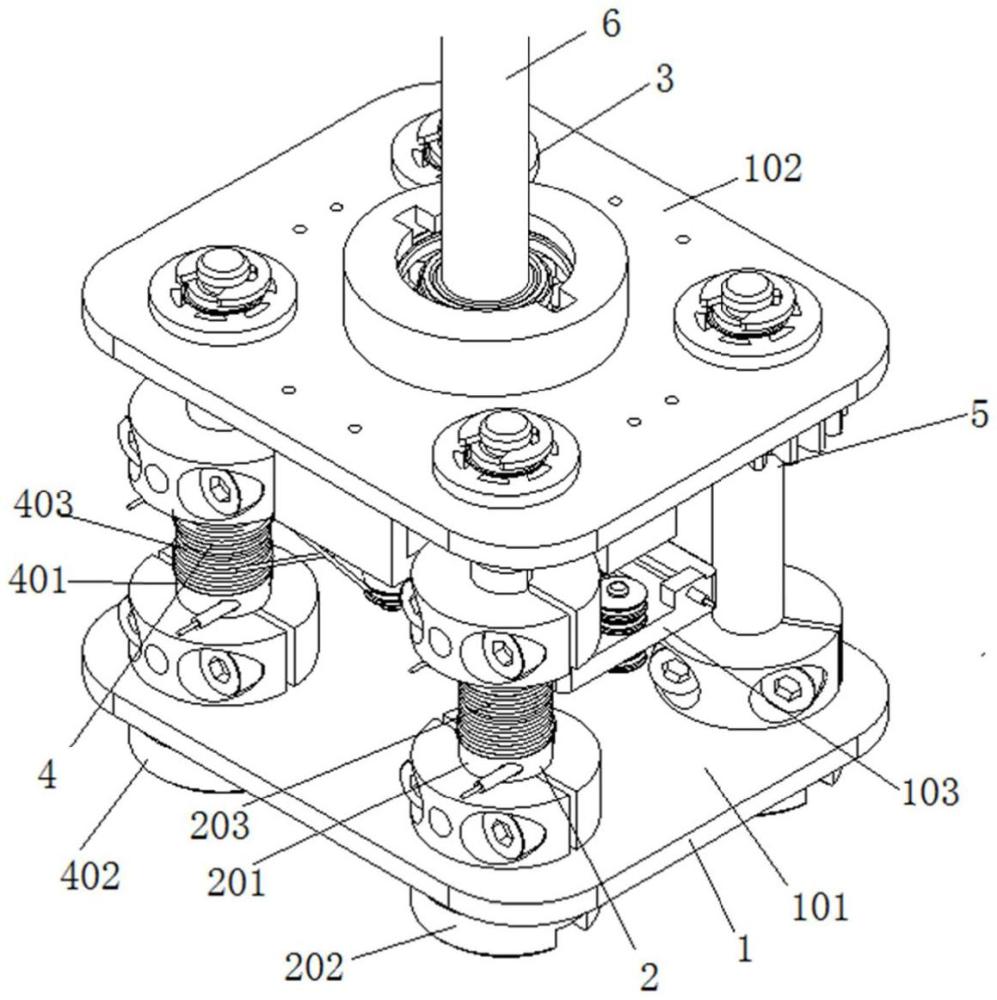
3、一种多自由度驱动转接机构,包括连接座,以及设置在所述连接座上的第一转接组件、第二转接组件、第三转接组件和第四转接组件;
4、所述连接座上还滑动设置有移动板和第一齿轮;所述连接座上设置有两个第一滑轮、两个第三滑轮、两个第四滑轮、两个第六滑轮、一个第七滑轮、一个第八滑轮和一个第九滑轮;所述移动板上设置有两个第二滑轮和两个第五滑轮;
5、所述第一转接组件上设置有第一钢丝,所述第一钢丝的两端分别绕过两个第一滑轮、两个第二滑轮和两个第三滑轮;所述第二转接组件上设置有第二钢丝,所述第二钢丝的两端分别绕过两个第四滑轮、两个第五滑轮和两个第六滑轮;所述第三转接组件上设置有第三钢丝,所述第三钢丝的一端绕过所述第七滑轮、第二滑轮和第一滑轮后固定到所述移动板的一端,所述第三钢丝的另一端绕过所述第八滑轮、第四滑轮、第五滑轮和第九滑轮后固定到所述移动板的另一端;所述第四转接组件上设置有与所述第一齿轮啮合的第二齿轮;
6、在动力设备的作用下,所述第一转接组件和所述第二转接组件分别驱动所述第一钢丝和所述第二钢丝的两端做反向运动,实现对手术器械的开合动作;所述第三转接组件驱动所述第一钢丝和所述第二钢丝的两端做同向运动,实现对手术器械的弯曲动作;所述第四转接组件驱动所述第一齿轮,实现对手术器械的旋转动作。
7、进一步的,第一转接组件包括转动设置在所述连接座上的第一转轴,所述第一转轴上的一端延伸到所述连接座外部设置有第一连接套。
8、进一步的,所述第一钢丝的两端反向缠绕固定在所述第一转轴上。
9、进一步的,第二转接组件包括转动设置在所述连接座上的第二转轴,所述第二转轴上的一端延伸到所述连接座外部设置有第二连接套。
10、进一步的,所述第二钢丝的两端反向缠绕固定在所述第二转轴上。
11、进一步的,第三转接组件包括转动设置在所述连接座上的第三转轴,所述第三转轴上的一端延伸到所述连接座外部设置有第三连接套。
12、进一步的,所述第三钢丝的中间位置固定在所述第三转轴上。
13、进一步的,第四转接组件包括转动设置在所述连接座上的第四转轴,所述第四转轴上的一端延伸到所述连接座外部设置有第四连接套;所述第二齿轮设置在所述第四转轴上。
14、进一步的,所述移动板为矩形框;用于连接两个第一滑轮的连接轴、用于连接第七滑轮的连接轴、用于连接两个第四滑轮的连接轴以及用于连接第九滑轮的连接轴与矩形框靠近四个角的内壁滑动连接。
15、为了实现上述目的,第二方面,本发明还提供了一种多自由度驱动机构,采用如下技术方案:
16、一种多自由度驱动机构,包括驱动设备,以及与所述驱动设备连接的如第一方面中所述的多自由度驱动转接机构。
17、为了实现上述目的,第三方面,本发明还提供了一种多自由度器械钳,采用如下技术方案:
18、一种多自由度器械钳,包括驱动设备和夹钳,所述驱动设备和所述夹钳之间设置有如第一方面中所述的多自由度驱动转接机构。
19、为了实现上述目的,第四方面,本发明还提供了一种手术机器人,采用如下技术方案:
20、一种手术机器人,包括机器人本体,所述机器人本体上设置有驱动设备,所述驱动设备连接有如第一方面中所述的多自由度驱动转接机构。
21、与现有技术相比,本发明的有益效果为:
22、本发明中在连接座上的第一转接组件、第二转接组件、第三转接组件和第四转接组件;连接座上设置有两个第一滑轮、两个第三滑轮、两个第四滑轮、两个第六滑轮、一个第七滑轮、一个第八滑轮和一个第九滑轮;移动板上设置有两个第二滑轮和两个第五滑轮;在动力设备的作用下,第一转接组件和第二转接组件分别驱动第一钢丝和第二钢丝的两端做反向运动,实现对手术器械的开合动作;第三转接组件驱动第一钢丝和第二钢丝的两端做同向运动,实现对手术器械的弯曲动作;第四转接组件驱动所述第一齿轮,实现对手术器械的旋转动作;通过不同转接件对第一钢丝和第二钢丝的驱动即可完成手术器械的开合动作及弯曲动作,实现了同一根钢丝执行多种动作的驱动方式,在不减少自由度的基础上,降低了对钢丝数量的使用,且不同动作的控制之间不会存在干扰。
技术特征:
1.多自由度驱动转接机构,其特征在于,包括连接座,以及设置在所述连接座上的第一转接组件、第二转接组件、第三转接组件和第四转接组件;
2.如权利要求1所述的多自由度驱动转接机构,其特征在于,第一转接组件包括转动设置在所述连接座上的第一转轴,所述第一转轴上的一端延伸到所述连接座外部设置有第一连接套。
3.如权利要求2所述的多自由度驱动转接机构,其特征在于,所述第一钢丝的两端反向缠绕固定在所述第一转轴上。
4.如权利要求1所述的多自由度驱动转接机构,其特征在于,第二转接组件包括转动设置在所述连接座上的第二转轴,所述第二转轴上的一端延伸到所述连接座外部设置有第二连接套。
5.如权利要求4所述的多自由度驱动转接机构,其特征在于,所述第二钢丝的两端反向缠绕固定在所述第二转轴上。
6.如权利要求1所述的多自由度驱动转接机构,其特征在于,第三转接组件包括转动设置在所述连接座上的第三转轴,所述第三转轴上的一端延伸到所述连接座外部设置有第三连接套。
7.如权利要求6所述的多自由度驱动转接机构,其特征在于,所述第三钢丝的中间位置固定在所述第三转轴上。
8.如权利要求1所述的多自由度驱动转接机构,其特征在于,第四转接组件包括转动设置在所述连接座上的第四转轴,所述第四转轴上的一端延伸到所述连接座外部设置有第四连接套;所述第二齿轮设置在所述第四转轴上。
9.如权利要求1所述的多自由度驱动转接机构,其特征在于,所述移动板为矩形框;用于连接两个第一滑轮的连接轴、用于连接第七滑轮的连接轴、用于连接两个第四滑轮的连接轴以及用于连接第九滑轮的连接轴与矩形框靠近四个角的内壁滑动连接。
10.多自由度驱动机构,其特征在于,包括驱动设备,以及与所述驱动设备连接的如权利要求1-9任一项所述的多自由度驱动转接机构。
11.多自由度器械钳,其特征在于,包括驱动设备和夹钳,所述驱动设备和所述夹钳之间设置有如权利要求1-9任一项所述的多自由度驱动转接机构。
12.手术机器人,其特征在于,包括机器人本体,所述机器人本体上设置有驱动设备,所述驱动设备连接有如权利要求1-9任一项所述的多自由度驱动转接机构。
技术总结
本发明属于医疗器械技术领域,提出了一种多自由度驱动转接机构、驱动机构、器械钳及手术机器人,在连接座上的第一转接组件、第二转接组件、第三转接组件和第四转接组件;在动力设备的作用下,第一转接组件和第二转接组件分别驱动第一钢丝和第二钢丝的两端做反向运动,实现对手术器械的开合动作;第三转接组件驱动第一钢丝和第二钢丝的两端做同向运动,实现对手术器械的弯曲动作;第四转接组件驱动所述第一齿轮,实现对手术器械的旋转动作;不同转接件对第一钢丝和第二钢丝的驱动即可完成手术器械的开合动作及弯曲动作,实现了同一根钢丝执行多种动作的驱动方式,在不减少自由度的基础上,降低了对钢丝数量的使用。
技术研发人员:王迎智,徐高峰
受保护的技术使用者:极限人工智能有限公司
技术研发日:
技术公布日:2024/11/26
技术研发人员:王迎智,徐高峰
技术所有人:极限人工智能有限公司
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除