一种刨削器速度控制系统及方法与流程
本发明涉及医疗器械,具体涉及一种刨削器速度控制系统及方法。
背景技术:
1、现有内窥镜手术刨削器,刀头的旋转方向分为正转、反转、往复转三种模式,三种转向的转速为联动模式,即调整其中一种模式的转速,其他两种模式的转速也会随之改变为相同数值;另外,在实际临床手术时,医生会根据病患实际情况,对刨削刀头种类,刀头转向,以及刀头转速进行灵活选用,而现有手术刨削器在更换刀头之后,需要重新设定相关运动参数,如转向、转速等;鉴于以上两种情况,现有刨削器的运动设置方式单一,明显不适合手术要求,增加了医生调整刨削参数的操作,延长手术时间。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种刨削器速度控制系统及方法,以克服目前刨削器的运动设置方式单一,无法满足手术需求的技术问题。
2、为实现以上目的,本发明采用如下技术方案:
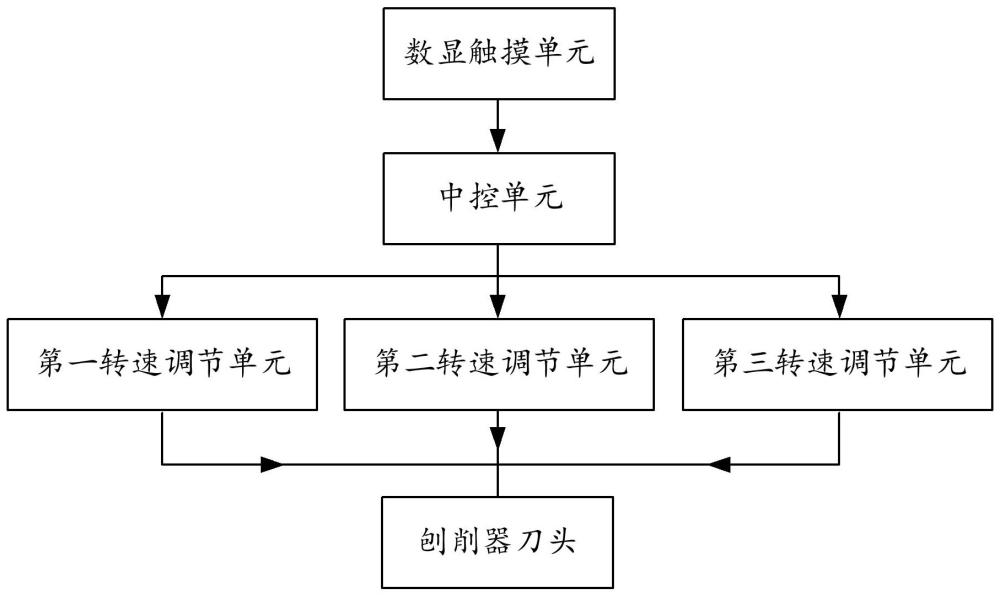
3、依据本发明第一方面,提供一种刨削器速度控制系统,所述系统包括数显触摸单元、中控单元以及三个独立的转速调节单元;所述数显触摸单元和各所述转速调节单元分别与所述中控单元通讯连接;
4、各所述转速调节单元分别连接刨削器刀头,用于控制所述刨削器刀头在不同转向模式下的转速;
5、所述数显触摸单元用于显示和/或选调刨削参数;所述刨削参数包括刀头种类、转向模式、转速信息中至少之一;
6、所述中控单元用于响应于医生通过所述数显触摸单元选调所的刨削参数,控制目标转向模式对应的转速调节单元调节刀头转速。
7、可选地,所述三个独立的转速调节单元分别为第一转速调节单元、第二转速调节单元和第三转速调节单元;
8、所述第一转速调节单元用于调节刨削器刀头的正转转速;
9、所述第二转速调节单元用于调节刨削器刀头的反转转速;
10、所述第二转速调节单元用于调节刨削器刀头的往复转转速。
11、可选地,所述转速调节单元包括电机驱动器和转速传感器;所述电机驱动器和所述转速传感器分别与所述中控单元通讯连接;
12、所述中控单元用于获取所述转速传感器采集的霍尔信号;对所述霍尔信号和所述转速信息进行运算处理,得到输出频率,利用所述输出频率,控制所述电机驱动器基于所述转速信息控制刀头旋转。
13、可选地,所述系统还包括存储器;所述存储器与所述中控单元通讯连接;
14、所述存储器用于存储通过所述数显触摸单元设置的转速信息;所述转速信息包括转速值;
15、所述中控单元还用于调用所述存储器中存储的转速信息控制刀头旋转。
16、可选地,所述中控单元还用于在所述刨削器插入刀头后,读取所述刀头的型号信息;判断所述型号信息与医生通过所述数显触摸单元选调的刀头种类是否一致;
17、当所述型号信息与所述刀头种类不一致时,通过所述数显触摸单元提示刀头错误,以提醒医生更换刀头。
18、可选地,所述中控单元还用于当判断所述型号信息与所述刀头种类一致后,调用所述型号信息对应的配置参数;所述配置参数包括转向模式、转速信息中至少之一;
19、所述数显触摸单元还用于对所述配置参数进行屏幕显示,以供医生参考和/或选调。
20、依据本发明第二方面,提出一种刨削器速度控制方法,应用于如本发明第一方面任一项所述的刨削器速度控制系统,所述方法包括:
21、通过数显触摸单元选调刨削参数,并将所述刨削参数发送至中控单元;所述刨削参数包括转向模式和/或转速信息;
22、所述中控单元接收来自所述数显触摸单元的刨削参数,确定所述转向模式对应的转速调节单元,并控制所述转速调节单元根据所述转速信息控制刀头旋转。
23、可选地,所述方法还包括:
24、所述存储器接收来自所述中控单元的转速信息,对所述转速信息进行存储;
25、所述中控单元还用于调用所述存储器中的转速信息,对所述转速信息进行运算处理,得到输出频率,利用所述输出频率,控制电机驱动器基于所述转速信息控制刀头旋转。
26、可选地,所述通过数显触摸单元选调刨削参数之前,所述方法还包括:
27、通过所述数显触摸单元选调的刀头种类并在刨削器中插入刀头;
28、利用所述中控单元读取所述刀头的型号信息;判断所述型号信息与医生通过所述数显触摸单元选调的刀头种类是否一致;
29、若所述型号信息与所述刀头种类不一致,通过所述数显触摸单元提示刀头错误,以提醒医生更换刀头。
30、可选地,所述方法还包括:
31、若所述型号信息与所述刀头种类一致,利用所述中控单元调用所述型号信息对应的配置参数,并将所述配置参数通过所述数显触摸单元进行屏幕显示,以供医生参考和/或选调。
32、本发明提供的上述一个或多个技术方案,可以具有如下优点或至少实现了如下技术效果:
33、本发明提出的一种刨削器速度控制系统及方法,其中系统包括数显触摸单元、中控单元以及三个独立的转速调节单元;所述数显触摸单元和各所述转速调节单元分别与所述中控单元通讯连接;各所述转速调节单元分别连接刨削器刀头,用于控制所述刨削器刀头在不同转向模式下的转速;所述数显触摸单元用于显示和/或选调刨削参数;所述刨削参数包括刀头种类、转向模式、转速信息中至少之一;所述中控单元用于响应于医生通过所述数显触摸单元选调所的刨削参数,控制目标转向模式对应的转速调节单元调节刀头转速。本发明的技术方案,通过独立调节各模式下的转速,医生可根据手术部位、需要修复的组织类型及手术阶段等不同需求,快速调整刨削相关运动参数,特别是刨削器的最佳转速,减少因频繁更换刀头或调整转速而消耗的手术时间,显著提高手术效率。
技术特征:
1.一种刨削器速度控制系统,其特征在于,所述系统包括数显触摸单元、中控单元以及三个独立的转速调节单元;所述数显触摸单元和各所述转速调节单元分别与所述中控单元通讯连接;
2.根据权利要求1所述的系统,其特征在于,所述三个独立的转速调节单元分别为第一转速调节单元、第二转速调节单元和第三转速调节单元;
3.根据权利要求2所述的系统,其特征在于,所述转速调节单元包括电机驱动器和转速传感器;所述电机驱动器和所述转速传感器分别与所述中控单元通讯连接;
4.根据权利要求3所述的系统,其特征在于,所述系统还包括存储器;所述存储器与所述中控单元通讯连接;
5.根据权利要求1所述的系统,其特征在于,
6.根据权利要求5所述的系统,其特征在于,
7.一种刨削器速度控制方法,其特征在于,应用于如权利要求1~6任一项所述的刨削器速度控制系统,所述方法包括:
8.根据权利要求7所述的方法,其特征在于,所述方法还包括:
9.根据权利要求7所述的方法,其特征在于,所述通过数显触摸单元选调刨削参数之前,所述方法还包括:
10.根据权利要求9所述的方法,其特征在于,所述方法还包括:
技术总结
本发明涉及一种刨削器速度控制系统及方法,其中系统包括:数显触摸单元、中控单元以及三个独立的转速调节单元;数显触摸单元和各转速调节单元分别与中控单元通讯连接;各转速调节单元分别连接刨削器刀头,用于控制刨削器刀头在不同转向模式下的转速;数显触摸单元用于显示和/或选调刨削参数;中控单元用于响应于医生通过数显触摸单元选调所的刨削参数,控制目标转向模式对应的转速调节单元调节刀头转速。通过本发明,独立调节各模式下的转速,医生可根据手术部位、需要修复的组织类型及手术阶段等不同需求,快速调整刨削相关运动参数,特别是刨削器的最佳转速,减少因频繁更换刀头或调整转速而消耗的手术时间,显著提高手术效率。
技术研发人员:董文兴,赵虎
受保护的技术使用者:北京天星医疗股份有限公司
技术研发日:
技术公布日:2024/11/26
技术研发人员:董文兴,赵虎
技术所有人:北京天星医疗股份有限公司
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除