一种基于实时数据流的交通安全监测方法、设备及介质与流程
本技术涉及交通安全监测,具体涉及一种基于实时数据流的交通安全监测方法、设备及介质。
背景技术:
1、随着城市化进程的加速和交通网络的日益复杂,交通安全问题已成为社会关注的焦点。传统的交通安全监测方法往往依赖于人工巡查、事故统计和事后分析,难以对行驶过程中的安全风险进行实时监控和处理,导致事故发生时无法及时响应。此外,车辆的交通运输数据通常分散在不同的系统和设备中,形成信息孤岛,限制了对车辆安全风险的全面评估和实时预警的能力。现有的监测方法多采用简单的规则或阈值来进行安全预警,无法根据复杂多变的交通环境和操作情况做出准确判断,容易导致误报或漏报,降低预警的有效性。
技术实现思路
1、为了解决上述问题,本技术提出了一种基于实时数据流的交通安全监测方法,包括:
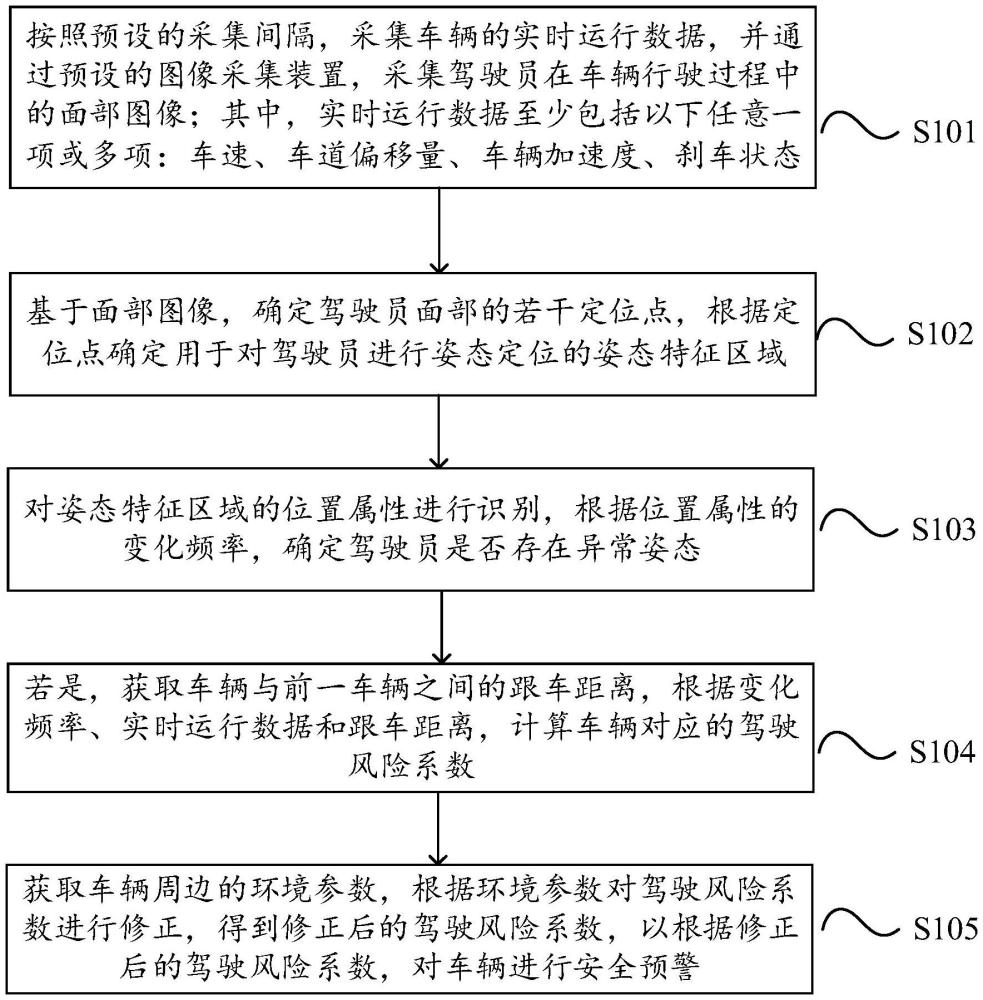
2、按照预设的采集间隔,采集车辆的实时运行数据,并通过预设的图像采集装置,采集驾驶员在车辆行驶过程中的面部图像;其中,所述实时运行数据至少包括以下任意一项或多项:车速、车道偏移量、车辆加速度、刹车状态;
3、基于所述面部图像,确定所述驾驶员面部的若干定位点,根据所述定位点确定用于对所述驾驶员进行姿态定位的姿态特征区域;
4、对所述姿态特征区域的位置属性进行识别,根据所述位置属性的变化频率,确定所述驾驶员是否存在异常姿态;
5、若是,获取所述车辆与前一车辆之间的跟车距离,根据所述变化频率、所述实时运行数据和所述跟车距离,计算所述车辆对应的驾驶风险系数;
6、获取所述车辆周边的环境参数,根据所述环境参数对所述驾驶风险系数进行修正,得到修正后的驾驶风险系数,以根据所述修正后的驾驶风险系数,对所述车辆进行安全预警。
7、在本技术的一种实现方式中,所述位置属性包括长度和方向夹角,对所述姿态特征区域的位置属性进行识别,具体包括:
8、对所述姿态特征区域进行初始化,以确定相邻定位点之间的初始长度和初始方向夹角;
9、对连续采集的面部图像中的所述姿态特征区域进行识别,确定产生变化的指定位置属性以及对应的指定位置属性变化量;
10、根据所述指定位置属性确定所述驾驶员对应的姿态类型;其中,所述姿态类型包括转动姿态、摆动姿态和俯仰姿态。
11、在本技术的一种实现方式中,根据所述位置属性的变化频率,确定所述驾驶员是否存在异常姿态,具体包括:
12、确定所述指定位置属性变化量是否超过预设变化量;其中,所述摆动姿态对应的预设变化量大于所述转动姿态和所述俯仰姿态对应的预设变化量;
13、若是,将所述指定位置属性作为异常位置属性,并确定所述异常位置属性对应的变化频率,在所述变化频率大于预设频率的情况下,确定所述驾驶员存在异常姿态。
14、在本技术的一种实现方式中,根据所述变化频率、所述实时运行数据和所述跟车距离,计算所述车辆对应的驾驶风险系数,具体包括:
15、根据所述车辆所在路段的路侧设备,采集所述车辆所在缓冲区域内的车辆数量;其中,所述缓冲区域是以所述车辆为圆心,缓冲距离为半径所形成的圆形区域,所述缓冲距离与所述车辆的车速呈正相关;
16、根据所述车辆数量计算所述缓冲区域内的车辆密度,并根据所述车辆密度与权重系数之间的映射关系,确定所述车辆密度对应的第一权重系数;其中,所述车辆密度与所述第一权重系数之间呈正相关关系;
17、将所述实时运行数据与所述车辆对应的安全运行数值范围进行匹配,以确定所述实时运行数据是否符合所述安全运行数值范围,并对所述实时运行数据分配对应的状态评估值;
18、根据所述状态评估值、所述变化频率和所述跟车距离,计算所述车辆对应的驾驶风险系数。
19、在本技术的一种实现方式中,根据所述状态评估值、所述变化频率和所述跟车距离,计算所述车辆对应的驾驶风险系数,具体包括:
20、计算所述状态评估值之间的乘积,根据所述第一权重系数对所述乘积进行加权,得到第一加权值;
21、对所述变化频率分配对应的第二权重系数,根据所述第二权重系数对所述变化频率进行加权,得到第二加权值,并确定所述第二加权值和所述跟车距离之间的比值;
22、将所述比值和所述第一加权值之间的总和,作为所述车辆对应的驾驶风险系数。
23、在本技术的一种实现方式中,根据所述环境参数对所述驾驶风险系数进行修正,得到修正后的驾驶风险系数,具体包括:
24、获取每个环境参数对应的参数范围,将采集到的所述环境参数与所述参数范围进行对比,以确定所述环境参数是否属于所述参数范围;
25、若否,计算所述环境参数与所述参数范围之间的上限值或下限值之间的差值,根据所述差值所属的差值区间,确定所述环境参数对应的修正系数;
26、根据所述修正系数对所述驾驶风险系数进行修正,得到修正后的驾驶风险系数。
27、在本技术的一种实现方式中,按照预设的采集间隔,采集驾驶员在车辆行驶过程中的面部图像之前,所述方法还包括:
28、获取所述车辆的当次行驶时间,并根据所述当次行驶时间,调整实时运行数据和面部图像的采集间隔;其中,所述当次行驶时间和所述采集间隔之间呈负相关关系。
29、在本技术的一种实现方式中,根据所述修正后的驾驶风险系数,对所述车辆进行安全预警,具体包括:
30、在所述驾驶风险系数超出预设值的情况下,对所述车辆进行安全预警提示,并获取所述车辆及其周边车辆的车辆位置,根据所述车辆位置生成所述车辆的引导路径,以使所述车辆按照所述引导路径驶入安全区。
31、本技术实施例提供了一种基于实时数据流的交通安全监测设备,所述设备包括:
32、至少一个处理器;
33、以及,与所述至少一个处理器通信连接的存储器;
34、其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够:
35、按照预设的采集间隔,采集车辆的实时运行数据,并通过预设的图像采集装置,采集驾驶员在车辆行驶过程中的面部图像;其中,所述实时运行数据至少包括以下任意一项或多项:车速、车道偏移量、车辆加速度、刹车状态;
36、基于所述面部图像,确定所述驾驶员面部的若干定位点,根据所述定位点确定用于对所述驾驶员进行姿态定位的姿态特征区域;
37、对所述姿态特征区域的位置属性进行识别,根据所述位置属性的变化频率,确定所述驾驶员是否存在异常姿态;
38、若是,获取所述车辆与前一车辆之间的跟车距离,根据所述变化频率、所述实时运行数据和所述跟车距离,计算所述车辆对应的驾驶风险系数;
39、获取所述车辆周边的环境参数,根据所述环境参数对所述驾驶风险系数进行修正,得到修正后的驾驶风险系数,以根据所述修正后的驾驶风险系数,对所述车辆进行安全预警。
40、本技术实施例提供了一种非易失性计算机存储介质,存储有计算机可执行指令,所述计算机可执行指令设置为:
41、按照预设的采集间隔,采集车辆的实时运行数据,并通过预设的图像采集装置,采集驾驶员在车辆行驶过程中的面部图像;其中,所述实时运行数据至少包括以下任意一项或多项:车速、车道偏移量、车辆加速度、刹车状态;
42、基于所述面部图像,确定所述驾驶员面部的若干定位点,根据所述定位点确定用于对所述驾驶员进行姿态定位的姿态特征区域;
43、对所述姿态特征区域的位置属性进行识别,根据所述位置属性的变化频率,确定所述驾驶员是否存在异常姿态;
44、若是,获取所述车辆与前一车辆之间的跟车距离,根据所述变化频率、所述实时运行数据和所述跟车距离,计算所述车辆对应的驾驶风险系数;
45、获取所述车辆周边的环境参数,根据所述环境参数对所述驾驶风险系数进行修正,得到修正后的驾驶风险系数,以根据所述修正后的驾驶风险系数,对所述车辆进行安全预警。
46、通过本技术提出的一种基于实时数据流的交通安全监测方法能够带来如下有益效果:
47、通过实时采集车辆运行数据、驾驶员行为、环境参数等多种数据,形成连续的数据流,确保了数据的实时性和准确性,能够对车辆行进过程进行全面监控,从而提升了安全性。采用图像处理和数据分析技术,能够识别驾驶员的异常姿态,并根据复杂多变的交通环境和操作情况动态计算驾驶风险系数,相较于简单规则或阈值判断,显著降低了误报和漏报率,提高了预警的有效性和准确性。
技术研发人员:李德强,景皓鑫,陈猛,王元强,池传雨
技术所有人:浪潮智慧科技有限公司
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除