电压源转换器的控制的制作方法
本公开总体上涉及电压源转换器的控制,尤其涉及用于确定包括第一轴线和第二轴线的处理平面的同步角度的方法、计算机程序和计算机程序产品、用于控制电压源转换器的控制器以及包括电压源转换器和该控制器的转换装置。
背景技术:
1、矢量电流控制(vcc)和功率同步控制(psc)是用于控制并网电压源转换器的两种不同方法。vcc继承自ac马达驱动的矢量控制,而psc模仿同步电机的动态特性。它们分别被认为是电网跟踪和电网形成方案,分别适合于与强电网和弱电网的连接。
2、在过去的几年中,这两个方案都得到稳健化,因此无论电网强度如何,它们现在都运行良好。有趣的是,构成稳健性的修改和增加具有使vcc和psc收敛到同一方案的效果。这一点已由l.harnefors等在2021年10月出版的《ieee journal of emerging and selectedtopics in power electronics》(《电气和电子工程师协会新兴和精选主题杂志》)第9卷第5期“a universal controller for grid-connected voltage-source converters”(“并网电压源转换器通用控制器”)一文中讨论。
3、总结这篇文章的研究结果,当psc重铸为类vcc结构时,psc包括三个控制块,如图1、2和3所示。
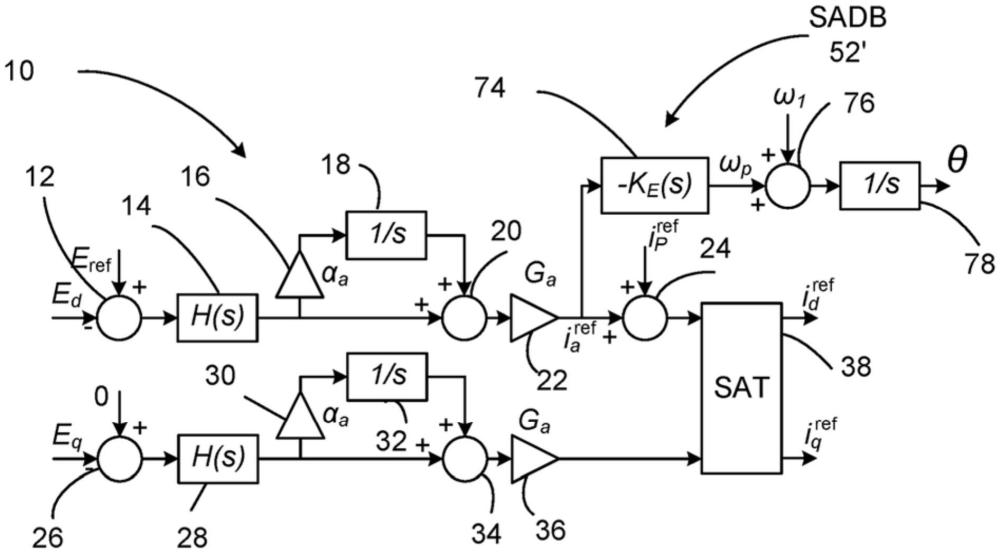
4、从图1中可以看出,存在ac电压控制块10,并且该ac电压控制块10在具有第一轴线和第二轴线的处理平面中操作。在文章中,处理平面为dq平面,其中d轴线为第一轴线,q轴线为第二轴线。为此,ac电压控制块10包括d轴线控制分支,该d轴线控制分支包括第一减法元件12,在该第一减法元件12中ac电压误差被计算,该ac电压误差是在电压源转换器的ac侧上的参考电压eref和ac电压ed之间的差,因此该误差是沿着dq平面的d轴线的电压ed的误差。此外,dq平面沿在ac侧处的电压而定向。电压误差eref–ed被提供给第一低通滤波器14,该第一低通滤波器14使用传递函数h(s)过滤ac电压误差。低通滤波电压误差随后被提供给第一相加元件20的第一输入。低通滤波后的电压误差还被提供给第一放大元件16,第一放大元件16以αa的增益放大ac电压误差。已放大和已滤波的ac电压误差随后被提供给第一积分元件18,第一积分元件18执行积分并将结果提供给第一相加元件20的第二输入。低通滤波后的ac电压误差与已放大并积分的低通滤波后的ac电压误差之和随后被提供给第二放大元件22,第二放大元件22将该和与增益ga相乘以获取已处理的ac电压误差该ac电压误差也是ac电压控制电流参考。已处理的ac电压误差随后被提供给第二相加元件24,以被加到有功功率产生的电流参考已处理的ac电压误差和有功功率产生的电流参考之和随后被提供给饱和元件38。
5、ac电压控制块10还包括q轴线控制分支,其中第二减法元件26从零减去沿q轴线的ac电压eq,从而提供负q轴线ac电压-eq作为输出。负q轴线ac电压-eq随后被提供给第二低通滤波器28,第二低通滤波器28使用传递函数h(s)对负q轴线ac电压-eq进行滤波。低通滤波后的负q轴线ac电压然后被提供给第三相加元件34的第一输入。低通滤波后的负q轴线ac电压也被提供给第三放大元件30,第三放大元件30以增益αa对其进行放大。然后,已放大和滤波后的负q轴线ac电压被提供给第二积分元件32,第二积分元件32执行积分并将结果提供给第三相加元件34的第二输入。低通滤波后的负q轴线ac电压与已放大并积分的低通滤波后的负q轴线ac电压之和随后被提供给第四放大元件36,第四放大元件36将该和与增益ga相乘。相乘后的和然后被提供给饱和元件38。
6、已处理的ac电压误差和有功功率产生的电流参考之和形成电流参考的d轴线分量,并且低通滤波后的负q轴线ac电压和已放大并积分的低通滤波后的负q轴线ac电压之和形成电流参考的q轴线分量。饱和元件38通过将电流参考的幅度限制在最大允许值,同时保持d轴线分量和q轴线分量之间的角度,使电流参考饱和。已饱和的电流参考随后作为d轴线电流参考和q轴线电流参考输出,以由电流控制块使用。
7、电流控制块40在图2中示出,并且包括第一、第二和第三并行分支。在第一分支中,在电压源转换器的ac侧的ac电压e在第三低通滤波器42中使用传递函数h(s)进行低通滤波,并且低通滤波后的电压被提供给第四相加元件50的第一输入端子。第二分支包括第三减法元件44,在第三减法元件44中形成电流误差,该电流误差是在电压源转换器的ac侧处的电流参考iref和ac电流i之间的差值。ac电流误差iref–i被提供给第五放大元件46,第五放大元件46以增益ra放大ac电流误差。已放大的ac电流误差随后被提供给第四相加元件50的第二输入。在第三分支中,ac电流i被第六放大元件48以增益jω1l放大,并且已放大的ac电流被提供给第四相加元件50的第三输入端子。第四相加元件50随后提供输入之和作为参考电压vref,以被用于控制电压源转换器。
8、从图3中可以看出,存在由同步角度确定分支sadb 52组成的同步控制块。该分支包括第四减法元件54,其在电压源转换器的ac侧的功率p和功率参考pref之间形成有功功率控制误差。有功功率控制误差pref–p被提供给处理元件56,在处理元件56中,有功功率控制误差被低通滤波并以增益kp放大,以便获得角频率ωp,角频率ωp被提供给第五相加元件58,在第五相加元件58中,该角频率被加到标称角频率ω1,并且该和在第三积分元件60中被积分,并被提供作为dq平面的同步角度θ。
9、在上述控制块中,e=ed+jeq和i=id+jiq分别是ac侧电压的dq平面空间向量,该电压可以是公共耦合点(pcc)处的电压和在同一点处的转换器输出电流i,vref是转换器电压的参考,l是电压源转换器和pcc之间的电感,ω1是标称角频率,且θ是在转换到dq平面和从dq平面转换时使用的dq平面角度或同步角度。因此,dq平面沿公共耦合点pcc处的电压而定向,而不是垂直于该电压而定向。
10、ac电压控制块10向电流控制块40提供参考当需要防止过流时,饱和(sat)到最大允许模数。(但是,sat通常是透明的,即不生效)。ac电压控制块10包括由d线轴控制分支和q轴线控制分支中的放大和积分元件16、18、22、30、32和36形成的pi控制器,该pi控制器形成d至d和q至q信号路径,并与低通滤波器14和28级联,给出传递函数:
11、
12、对于psc对应,p增益被选择为ga=1/ra,其中ra是电流控制块40的比例或p增益,积分或i增益被选择为αa=0.1–0.2p.u.,其中p.u.代表每单位。由psc导致的功率控制不同于传统的从d到q耦合的功率控制器。在d轴线控制分支中,有功功率产生的电流分量参考
13、
14、被加入,其中pref为有功功率参考,eref为e的参考,κ=3/(2k2),k为空间矢量缩放常数。
15、电流控制块40具有比例项或p项、dq解耦器和通过低通滤波器h(s)的pcc电压前馈,其可以但不必须与ac电压控制块10中的这些项相同。如果需要,可以加入积分或i部分,以及用于负序和谐波控制的谐振部分。建议选择以下选项:
16、ra=αcl
17、其中,αc为所期望的闭环带宽。
18、ac电压控制块10和电流控制块30共同形成反馈环路,该反馈环路在稳定状态下将ac电压误差调节低至零。
19、图3中的同步控制块是模拟同步电机的摆动等式的功率控制块,基于有源功率控制误差pref-p.kp(s)=kp(即p控制器)计算dq平面角度产生无虚拟惯性的响应。虚拟惯性可通过将低通滤波器与p增益级联来被增加。pi控制消除了固有频率下降,否则当电网角频率ωg偏离ω1时,固有频率下降会产生静态误差pref-p。
20、在文章中给出了以下增益选择建议:
21、
22、在文章中,将图1、图2和图3给出的psc与以psc为准则设计的vcc方案进行了实验比较。电流控制块是相同的,但是使用传统的电压控制器作为电压控制块。同步采用锁相环(pll)而非功率控制器。这些方案表现相似,但与vcc相比,psc仍有明显的优势和劣势。
23、-在瞬变时,由于使用了功率控制器而非pll进行同步,eq中的偏差较小。这倾向于在p中给出无过冲的阶跃响应。
24、-对于高电流和高增益ra,存在振铃趋势。随着ra进一步增加,这最终会变成不稳定。因此,必须注意ra的上限,但对于vcc的情况并非如此。不稳定的影响是由功率控制器造成的。
25、例如,meersman等人在第45届国际大学电力工程会议upec2010的“overviewofpll methods for distributed generation units”中描述了使用pll(锁相环)来确定同步角度。harnefors等人在《generic pll-based grid-forming control》(ieeetransactions on power electronics,2022年2月)中又披露了一种pll,该pll与电源控制器以及ac电压控制器(avc)相结合,向电流控制器(cc)提供电流参考。
26、本发明的各方面涉及提供一种处理这种振铃的控制器。
技术实现思路
1、因此,本发明的方面涉及处理在由电压源转换器提供的电流中的振铃的问题。
2、本目标根据通过确定包括第一轴线和第二轴线的处理平面的同步角度的方法的第一方面来被实现,该方法在控制器中被执行,该控制器控制具有交流ac侧和直流dc侧的电压源转换器,该方法包括:
3、处理ac电压误差,其中ac电压误差是在电压源转换器的ac侧处沿ac电压的第一轴线的电压分量的误差,以由此获取已处理的ac电压误差,ac电压误差的处理是在用于控制在电压源转换器的ac侧处的ac电压反馈环路中进行处理,并且
4、基于已处理的ac电压误差确定用于处理平面的同步角度。
5、本目标根据通过用于控制具有交流ac侧和直流dc侧的电压源转换器的控制器的第二方面来被实现,该控制器被配置为:
6、处理ac电压误差,其中ac电压误差是在电压源转换器的ac侧处沿ac电压的第一轴线的电压分量的误差,其中第一轴线是处理平面的轴线,处理平面也包括第二轴线,ac电压误差的处理在用于控制在电压源转换器的ac侧处的ac电压的反馈环路中进行处理,并且基于已处理的ac电压误差确定用于处理平面的同步角度。
7、本目标根据通过包括电压源转换器和根据第二方面所述的控制器的转换装置的第三方面来被实现。
8、本目标通过用于确定包括第一轴线和第二轴线的处理平面的同步角度的计算机程序的第四方面来被实现,其中同步角度由包括处理器的控制器使用并且被配置为控制电压源转换器,该计算机程序被配置为在由控制器的处理器操作时实现根据第一方面所述的操作。
9、本目标根据通过用于确定包括第一轴线和第二轴线的处理平面的同步角度的计算机程序产品的第五方面来被实现,该计算机程序产品包括具有根据第四方面所述的计算机程序的数据载体。
10、反馈环路中的ac电压误差的处理可以包括将ac电压误差调节至零。
11、处理平面可以是执行ac电量(诸如电流和电压量)处理的平面。处理平面可以是dq平面。在这种情况下,第一轴线可以是d轴线,第二轴线可以是q轴线。处理平面还可以沿电压源转换器的ac侧处的电压而定向。因此,它也不垂直于转换器ac侧处的电压而定向。
12、ac电压误差可以作为沿第一轴线的电压分量和参考电压之间的差来形成,该参考电压与零分离。因此,参考电压也不同于零。
13、控制器可以是映射到矢量电流控制结构上的功率同步控制器。电压源转换器的ac侧处的电压附加地可以是在公共耦合点处的电压。
14、根据第一方面的变型,确定同步角度包括将比例控制应用在已处理的ac电压误差上,以用于获取角速度。
15、根据第二方面的对应的变型,当被配置为确定同步角度时,控制器被配置为将比例控制应用在已处理的ac电压误差上以获取角速度。
16、比例控制的应用可以涉及使用增益放大已处理的ac电压误差。
17、比例控制也可以与已处理的ac电压误差的低通滤波组合。
18、根据第一方面的另一变型,确定同步角度包括将已获取的角速度与标称角速度组合。
19、根据第二方面的对应的变型,当被配置为确定同步角度时,控制器被配置为将已获取的角速度与标称角速度组合。
20、标称角速度可以是在电压源转换器ac侧处的标称角速度。电压源转换器可以被连接到ac电网。在这种情况下,标称角速度可以是ac电网的标称角速度。
21、角速度的组合可以包括形成标称角速度和已确定的角速度之和。
22、根据第一方面的另一变型,确定同步角度包括对已组合的角速度进行积分以便获取同步角度。
23、根据第二方面的对应的变型,当被配置为确定同步角度时,控制器被配置为对已组合的角速度进行积分以便获取同步角度。
24、该方法还可以被认为是控制电压源转换器的方法。
25、在这种情况下,根据第一方面所述的方法可以还包括在电压源转换器的ac侧处获取电压,确定用于电压源转换器的参考电压,其中ac侧电压在控制平面中被获取并且所述参考电压在处理平面中被确定,使用同步角度将ac侧电压从控制平面转换到处理平面并且使用同步角度将参考电压从处理平面转换到控制平面。
26、根据第二方面所述的控制器可以根据对应的变型进一步被配置为在电压源转换器的ac侧处获取电压,确定用于电压源转换器的参考电压,其中ac侧电压在控制平面中被获取并且所述参考电压在处理平面中被确定,使用同步角度将ac侧电压从控制平面转换到处理平面并且使用同步角度将参考电压从处理平面转换到控制平面。
27、控制平面是测量或获取电量并且执行控制的平面,诸如abc平面。
28、根据第一方面的另一变型,处理ac电压误差包括将比例和积分控制应用于ac电压误差上。
29、根据第二方面的对应的变型,当被配置为处理ac电压误差时,控制器进一步被配置为将比例和积分控制应用于ac电压误差上。
30、处理ac电压误差还可以包括对ac电压误差进行低通滤波。
31、根据第一方面的另一变型,该方法还包括基于已处理的ac电压误差确定电流参考。
32、根据第二方面的对应的变型,控制器进一步被配置为基于已处理的ac电压误差确定电流参考。
33、根据第一方面的另一变型,确定电流参考包括基于已处理的ac电压误差确定沿第一轴线的电流参考的分量。
34、根据第二方面的对应的变型,当被配置为确定电流参考时,控制器被配置为基于已处理的ac电压误差确定沿第一轴线的电流参考的分量。
35、在这种情况下,可以确定沿第一轴线的电流参考的分量作为已处理的ac电压误差与有功功率产生的电流参考的组合,其中该组合可以作为已处理的ac电压误差与有功功率产生的电流参考之和而被形成。
36、根据第一方面的另一变型,确定电流参考包括基于沿第二轴线的ac电压的已处理的电压分量确定沿第二轴线的电流参考的分量。
37、根据第二方面的对应的变型,当被配置为确定电流参考时,控制器被配置为基于沿第二轴线的ac电压的已处理的电压分量确定沿第二轴线的电流参考的分量。
38、可以基于沿第二轴线的ac电压的已处理的电压分量来确定沿第二轴线的电流参考的分量,该已处理的电压分量可以通过将比例和积分控制应用于沿第二轴线的ac电压的电压分量上来获取。此处,沿第二轴线的ac电压也可能已经进行低通滤波。
39、确定电流参考还可以包括使电流参考饱和,例如将电流参考的幅度限制在最大允许值,同时保持相角。
40、根据第一方面的方法可以附加地包括处理电流参考,以获取用于控制电压源转换器的控制电压。
41、以类似的方式,根据第二方面的控制器可以附加地被配置为处理电流参考,以获取用于控制电压源转换器的控制电压。
42、处理电流参考可以包括在电流参考和电压源转换器的ac侧上的ac电流之间形成电流误差,并处理该电流误差以获取参考电压。
43、在这种情况下,处理电流参考可以包括执行电流误差的比例控制,例如,使用增益放大电流误差,并且可能在ac侧电压已经进行低通滤波之后,将已处理的电流误差与已放大的ac侧电流和ac侧电压进行组合,其中组合的结果是用于电压源转换器的参考电压。该组合可以作为已处理的电流误差、已放大的ac侧电流和ac侧电压之和来附加地被获取。
44、对已处理的ac电压误差应用比例控制可以涉及使用增益ke放大已处理的ac电压误差,该增益ke可以是用于放大功率控制块中的功率误差的增益kp的修改,该功率控制块可以模拟同步电机的摆动等式。
45、在已处理的ac电压误差的比例控制中使用的增益ke还可以基于用于形成ac电压误差的参考电压eref。在已处理的交流电压误差的比例控制中使用的增益ke也可以基于当对ac电压误差应用比例和积分控制时使用的增益ga。在已处理的ac电压误差的比例控制中使用的增益ke还可以基于在电流误差的比例控制中使用的比例增益ra。在已处理的ac电压误差的比例控制中使用的增益ke也可以基于空间矢量缩放常数κ。
46、在已处理的ac电压误差的比例控制中使用的增益ke可以附加地被设置为
47、控制器附加地可以被认为包括ac电压控制块,该ac电压控制块包括用于第一轴线的控制分支和用于第二轴线的控制分支,以及用于确定由第一轴线和第二轴线形成的处理平面的同步角度的同步角度确定分支,其中同步角度控制分支被连接到用于第一轴线的控制分支。
48、在这种情况下,电压控制块也可被视为包括比例和积分控制实体,其中同步角度控制分支的输入被连接到比例和积分控制实体的输出。
49、一般而言,权利要求中使用的所有术语应根据其在技术领域中的普通含义进行解释,除非本技术中另有明确定义。所有提及“一/一个/该元件、装置、组件、装置等”之处。应被公开解释为指“元件、装置、组件、装置等”的至少一个实例。除非另有明确说明。
技术研发人员:伦纳特·哈内弗斯,米科·罗蒂莫
技术所有人:ABB瑞士股份有限公司
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除