基于无人机的四分裂间隙棒自动安装设备及方法与流程
本发明属于电线或电缆的架空安装,尤其涉及一种基于无人机的四分裂间隙棒自动安装设备及方法。
背景技术:
1、随着经济的不断发展,电能消耗量也与之俱增,国家加快了高压、特高压电网的建设,工程建设中为进一步提高输电效率和输电质量,广泛使用了分裂导线,分裂导线是一种可减少线路阻抗、抑制电晕放电的一种新型导线架设方式,可有效提高线路的自然功率因数,进而提高电能输送质量。
2、现有500kv、750kv等输电线路多采用四分裂结构,每一相由四束钢芯铝绞线组成,电网的架设相对比较复杂,杆塔高度较高,更容易产生舞动。由于输电线路舞动具有舞动范围涉及到多个省、舞动发生的规模大涉及到各电压范围的输电线路等特点,同时现有输电线路架设高度较高,结构上使用双回路塔杆结构,使线路舞动时输电线及塔杆会承受巨大的载荷与弯矩,极易受损。从舞动发生的自然因素与线路结构特点可知,线路舞动会对输电线路的正常工作造成安全隐患,线路舞动不仅会导致短路跳闸,长时间的舞动还会损害输电线缆以及输电线上的电力金具。为防止线路舞动,需要合理的布置四分裂间隔棒。
3、目前高空输电线路上的四分裂阻尼间隔棒安装完全依赖于人工的背负和作业,因为高压缆线的架设环境常处于恶劣环境,安装塔的间距离较远,高压线路带电导致人工作业存在许多弊端:
4、1、安装效率低:由于输电线线路架设两塔杆之间的单间距长达200-600m,四分裂间隔棒的安装间隔应保持在80-90m之间,单个四分裂阻尼间隔棒重达4.6kg,工人携带四分裂隔离棒上到高架上,再间隔安装。由于高空动作受阻,同时工人很难一次性背负单间距所需的所有四分裂间隔棒,需要多次往返取间隔棒,高空作业导致体力消耗巨大,安装过程费时费力。
5、2、风险系数高:高空作业人的支撑点少,又是高空,高空作业安全性差、危险性高,同时工人作业环境恶劣。
6、3、安装困难:一些架空输电线路的地形较为复杂,例如山区和丘陵地带,挂载装置的安装难度较大,需要增加人力和物力的投入。
技术实现思路
1、本发明的目的是提供一种基于无人机的四分裂间隙棒自动安装设备及方法,旨在解决现有人工背负四分裂间隙棒进行高空作业存在安全隐患、安装难度大、工作效率低的技术问题。
2、为解决上述技术问题,本发明所采取的技术方案是:
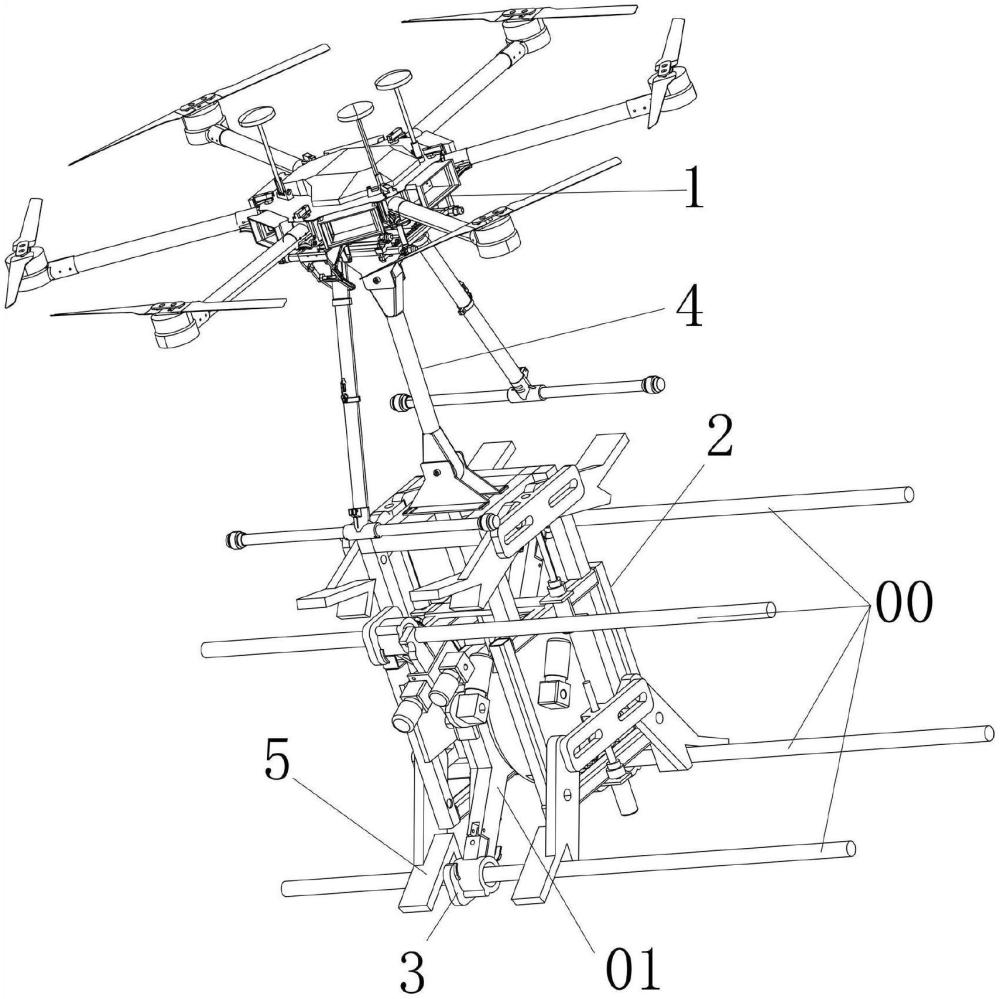
3、一种基于无人机的四分裂间隙棒自动安装设备,所述自动安装设备包括无人机、基础框架、仿形压紧装置和携带安装工具的微调机械臂,所述基础框架通过软连接与无人机相连,所述基础框架的两侧设有定位机构,用于与四根导线配合;所述微调机械臂和仿形压紧装置均与基础框架相连,所述仿形压紧装置用于压紧四分裂间隙棒,通过微调机械臂和仿形压紧装置的配合将四分裂间隙棒夹紧定位在导线上,利用安装工具将四分裂间隙棒固定在导线上;所述基础框架上设有电池、图像采集模块、定位模块和控制模块,所述电源为图像采集模块、定位模块、控制模块、定位机构、仿形压紧装置及微调机械臂提供电源,所述图像采集模块、定位模块、定位机构、仿形压紧装置、微调机械臂及安装工具均与控制模块相连,所述控制模块与遥控器无线连接。
4、进一步的,所述定位机构包括八个定位臂和用于驱动定位臂的驱动部件,八个定位臂分别设置于基础框架左右两的侧四角部位,所述驱动部件为四套、且对称设置于基础框架左右两侧的上下部位;所述定位臂的中部与基础框架转动配合,所述定位臂的连接端与驱动部件相连,所述定位臂的自由端设有能够卡持导线的v形卡槽;所述驱动部件与电池和控制模块相连。其中,所述v形卡槽的上侧边的长度大于下侧边的长度。
5、进一步的,所述基础框架包括固定框架及其下方的门型框架,所述固定框架设置于门型框架的顶部,所述固定框架与软连接的下端相连;上下定位臂的中部分别与固定框架及门型框架的两端转动配合,四套驱动部件两两对称设置于门型框架的上下两侧边框中部;所述仿形压紧装置和微调机械臂并列设置于门型框架的内部两侧、且均与门型框架的两侧边框相连;四套驱动部件分别设置于固定框架及门型框架左右两侧边框的顶部及底部;所述控制模块及图像采集模块和定位模块分别设置于固定框架的内外部。
6、进一步的,所述驱动部件包括电机ⅰ、丝杆ⅰ和连杆,所述电机ⅰ的输出轴与丝杆ⅰ同轴固定,所述丝杆ⅰ与连杆中部螺纹配合,四根连杆分别水平设置于固定框架及门型框架左右两侧的顶部及底部;所述定位臂的连接端通过销轴与连杆两侧的长条槽滑动配合;所述电机ⅰ与电池和控制模块相连。
7、进一步的,所述仿形压紧装置包括垫板、仿形压板、电机ⅱ、丝杆ⅱ和多根导向柱,所述垫板直立于门型框架的中部、且平行于门型框架的两侧边框,所述垫板的顶部通过横梁与门型框架的两侧边框相连;所述仿形压板与四分裂间隙棒的形状类似,所述四分裂间隙棒能够置于仿形压板与垫板之间;多根导向柱间隔固定于仿形压板的外侧面上,所述门型框架的侧面边框上对应设有与导向柱相匹配的导向孔,所述电机ⅱ设置于门型框架的侧面边框外部,所述电机ⅱ与丝杆ⅱ的外侧一端相连,所述丝杆ⅱ的另一端贯穿门型框架的侧面边框与仿形压板相连,所述电机ⅱ驱动丝杆ⅱ转动,进而丝杆ⅱ带动仿形压板将四分裂间隙棒顶紧在垫板上;所述电机ⅱ与电池和控制模块相连。
8、进一步的,所述仿形压板包括主体板及其四角部位的倾斜卡持臂,所述卡持臂的末端设有卡钩,所述卡钩能够套装在四分裂间隙棒的线夹一端外部,所述卡钩的根部设有能够卡紧线夹末端紧固螺栓的u形卡爪,u形卡爪为上下并列的两个,且两个u形卡爪的中间设有能够卡住紧固螺栓的u形板,所述u形板的开口与u形卡爪垂直交叉,且u形板的内槽设有与紧固螺栓配合的内螺纹;所述主体板的四周边缘中部均设有l形限位块,所述限位块用于对四分裂间隙棒的四周限位。
9、进一步的,所述微调机械臂包括固定板、旋转机构和用于固定导线的卡紧机构,所述固定板设置于门型框架的侧面边框内侧,所述旋转机构设置于固定板的内侧面,所述旋转机构能够驱动卡紧机构绕固定板的中心旋转,所述卡紧机构的活动端与定位臂分别置于导线的上下侧,实现固定导线的目的;且安装工具设置于卡紧机构的活动端侧面。
10、进一步的,所述旋转机构包括旋转导轨、电机ⅲ和旋臂ⅰ,所述旋转导轨固定于固定板的内侧面,所述电机ⅲ设置于固定板的外侧,所述电机ⅲ的输出轴贯穿固定板与旋臂ⅰ的驱动端相连,用于驱动旋臂ⅰ沿着旋转导轨旋转;所述旋臂ⅰ的末端与卡紧机构相连;所述卡紧机构包括电机ⅳ和旋臂ⅱ,所述电机ⅳ和旋臂ⅱ分别设置于旋臂ⅰ的端部两侧,所述电机ⅳ用于驱动旋臂ⅱ旋转,所述旋臂ⅱ的末端两侧均设有用于与导线配合的圆弧槽,且安装工具设置于圆弧槽根部的旋臂ⅱ侧壁上;所述电机ⅲ、电机ⅳ均与电池和控制模块相连。
11、进一步的,所述安装工具包括u形支座和伸缩机构,所述伸缩机构设置于u形支座的中部,所述u形支座的两个开放端外侧分别设有紧固机构和用于容纳多个螺母的螺母盒,螺母盒中螺母数量与四分裂间隙棒的线夹数量一致;所述伸缩机构包括伸缩电机和丝杆ⅲ,所述丝杆ⅲ的一端与伸缩电机的输出轴相连、另一端贯穿u形支座中部与旋臂ⅱ相连,所述丝杆ⅲ与u形支座螺纹配合;所述紧固机构包括紧固电机和扳手套筒,所述紧固电机的输出轴与扳手套筒的上端固连,所述扳手套筒的另一端贯穿u形支座的一个开放端,且扳手套筒的末端为与紧固螺栓顶部螺帽相匹配的六方孔;所述螺母盒的上端开口与u形支座的另一个开放端相连、且该侧开放端中部设有供螺母通过的出口,所述螺母盒为内自上至下设有多个螺母放置区,相邻螺母放置区之间设有薄隔板。
12、本发明还提供一种基于无人机的四分裂间隙棒自动安装方法,包括以下步骤:
13、组装上述自动安装设备:将四分裂间隙棒紧贴仿形压紧装置固定在基础框架内,此时四分裂间隙棒的四个线夹呈张开状态;
14、启动无人机带动四分裂间隙棒升空,并在图像采集模块、定位模块和控制模块作用下落在导线上;落线过程如下:
15、首先无人机携带基础框架旋转90°进入四根导线之间再复位,启动定位机构及微调机械臂卡紧四根导线,实现四分裂间隙棒在导线上的定位;
16、利用安装工具将四分裂间隙棒固定在导线上,再控制仿形压紧装置使四分裂间隙棒与之分离;
17、无人机及基础框架旋转90°,然后控制使定位机构脱离四根导线,自动安装设备返回。
18、采用上述技术方案所产生的有益效果在于:与现有技术相比,本发明通过无人机带动夹持四分裂间隙棒的基础框架上升至导线高度,借助图像采集模块、定位模块和控制模块可使基础框架进入四根导线之间、并通过定位机构及微调机械臂卡紧导线,利用安装工具将四分裂间隙棒安装固定在导线上后,再控制仿形压紧装置与四分裂间隙棒分离、定位机构脱离四根导线,自动安装设备返回。采用本发明无需工作人员高空作业,远程操作即可完成四分裂间隙棒的自动安装,极大提高了安装效率和安全系数,降低了安装难度,方便推广应用。
技术研发人员:卢秋红,杨小林,张时勉
技术所有人:上海合时无人机科技有限公司
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除