机器人及机器人行走控制方法、存储介质和设备与流程
本发明涉及机器人,具体而言,涉及机器人及机器人行走控制方法、存储介质和设备。
背景技术:
1、电力系统中传统电站的设备巡检主要是通过人工巡检加固定视频巡检,主要依靠巡检人员的感官及配套的检测仪器对电气设备进行以简单定性判断为主的检查,或通过视频对设备远程静态巡查,这种方式存在劳动强度大、检测质量分散、主观因素多等缺陷。
2、近年来,随着计算机技术飞速发展和机器人在电站的普及使用,电站巡检机器人因其控制方式灵活、不受时间和天气等因素的影响,逐渐在无人值守的电站设备控制室承担巡检任务。但运行使用过程中电站巡检机器人通常会受设备控制室复杂的电磁干扰,诸如设备盘柜柜门为玻璃门、设备控制室人员的通行、设备检修安全措施遮挡等复杂的设备环境因素也容易影响其正常的运行。类似的情况下,会导致机器人发生误碰或出现巡检死角,其获取的图像也随之受影响,出现图像画面模糊受损,获取巡检数据失败等问题,不便于后期对图像、数据的处理。
3、因此,为预防事故发生,确保设备安全运行,有必要提出一种机器人及机器人行走控制方法、存储介质和设备来解决上述问题。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。
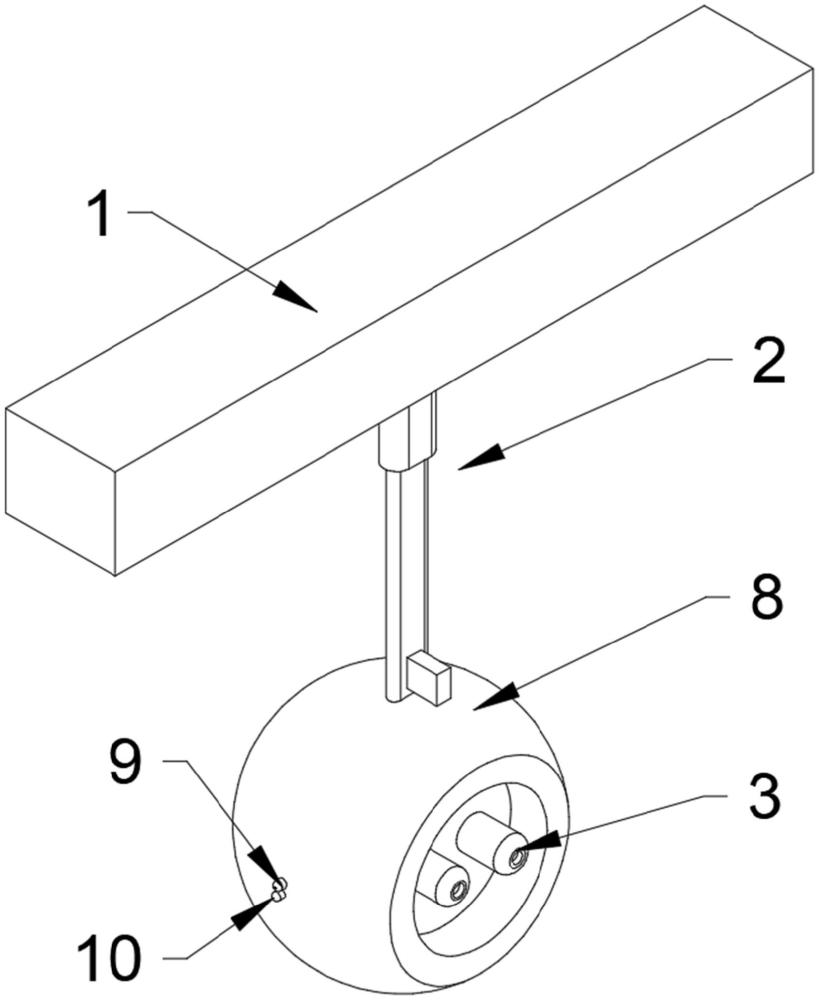
2、为此,本发明一方面提供了一种机器人,包括悬挂部、机器主体以及检测部,所述悬挂部与所述机器主体相连,并用于将所述机器主体悬挂于指定位置,所述检测部设置在所述机器主体上;
3、所述检测部包括一组障碍识别单元,所述障碍识别单元包括至少一个近距离障碍识别单元,所述近距离障碍识别单元用于判断在指定识别方向的第二距离内是否存在障碍物;
4、所述机器主体上设置有至少两组障碍识别单元,两组所述障碍识别单元相背设置,两组所述障碍识别单元分别沿第一方向和第二方向设置;
5、其中,所述第一方向与所述第二方向夹角为0°-90°。
6、在上述技术方案中,所述障碍识别单元还至少包括一个远距离障碍识别单元,所述远距离障碍识别单元用于判断在指定识别方向的第一距离内是否存在障碍物,所述第一距离大于第二距离。
7、在上述技术方案中,所述机器主体上设置有至少两组障碍识别单元,两组所述障碍识别单元分别沿第一方向和第三方向设置;
8、其中,所述第一方向与所述第三方向夹角为45°-90°。
9、在上述技术方案中,所述机器主体上还设置有碰撞感应单元,所述碰撞感应单元用于采集以及上传产生碰撞时的第一数据。
10、在上述技术方案中,所述机器主体上还设置有影像摄录装置,所述影像摄录装置用于采集影像信息。
11、在上述技术方案中,所述悬挂部包括悬挂梁以及吊臂组件,所述吊臂组件与所述悬挂梁相连,且所述吊臂组件具有伸缩结构。
12、在上述技术方案中,所述影像摄录装置包括双目摄像头。
13、在上述技术方案中,所述碰撞感应单元包括碰撞传感器。
14、在上述技术方案中,所述远距离障碍识别单元包括激光雷达。
15、在上述技术方案中,所述近距离障碍识别单元包括超声波雷达。
16、在上述技术方案中,所述机器主体包括类球体外壳。
17、本发明的另一方面提供一种机器人行走控制方法,包括如下步骤:
18、判断机器人是否进行自动巡检,如果为是则进行数据收集,如果为否则结束运行;
19、通过获得的数据判断是否捕获障碍物,如果为是,则进行第一计算分析,如果为否,则计算机器人运行速度;
20、通过第一计算分析判断是否进行避障,如果为是,则机器人绕过障碍物继续运行,如果为否,则机器人结束运行;
21、机器人运行并且识别、录制设备数据;
22、判断录制的设备数据是否为最后一组设备数据,如果为是,则结束运行返回起点,如果为否则机器人继续运行。
23、在上述技术方案中,所述机器人运行过程还包括以下步骤:识别设备身份;识别设备状态,其中所述设备状态包括有标识设备检修状态、有标识设备运行状态以及无表示运行状态。
24、在上述技术方案中,通过第一计算分析判断是否进行避障,所述第一计算分析包括以下步骤:当在指定识别方向的第一距离内存在障碍物时,机器人减速运行;当在指定识别方向的第二距离内存在障碍物时,机器人停止运行;当在指定识别方向上机器人与障碍物发生碰撞时,机器人停止运行;其中,所述第一距离大于第二距离。
25、在上述技术方案中,一种机器人行走控制方法还包括第一决策,所述第一决策包括监测用于数据收集的装置是否故障,当用于数据收集的装置故障时发出警示信号。
26、在上述技术方案中,一种机器人行走控制方法还包括第二决策,所述第二决策包括设定机器人巡检路线。
27、在上述技术方案中,一种机器人行走控制方法还包括第四决策,所述第四决策包括依据不同设备状态,设定不同识别和/或录制方式。
28、在上述技术方案中,所述机器人巡检路线包括单个设备巡检、指定多个设备巡检、单路径全设备巡检、多路径全设备巡检。
29、本发明另一方面还提供一种计算机可读存储介质,所述计算机可读存储介质用于存储计算机指令,当其在计算机上运行时,使得计算机执行所述的机器人行走控制方法。
30、本发明另一方面还提供一种基于信号特征变化的机器人行走控制设备,其特征在于,包括处理器以及存储器;所述存储器,用于存储程序代码,并将所述程序代码传输给所述处理器;所述处理器,用于根据所述程序代码中的指令执行所述的机器人行走控制方法。
31、综上所述,由于采用了上述技术特征,本发明的有益效果是:
32、使用本申请提供的一种机器人能够对多方向的远距离、近距离的障碍物进行识别判断,其识别判断操作更加具有针对性,其上传的有关障碍物的距离数据也更加精准;本申请所提供的一种机器人行走控制方法,能够运用双目摄像头、碰撞传感器、激光雷达、超声波雷达等监测识别机器人周围的障碍物情况,及时准确的进行判断规划,完成机器人行走控制以及设备的信息识别录制。
33、本发明的附加方面和优点将在下面的描述部分中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种机器人,其特征在于:
2.根据权利要求1所述的一种机器人,其特征在于:
3.根据权利要求1或2所述的一种机器人,其特征在于:
4.根据权利要求2所述的一种机器人,其特征在于:
5.根据权利要求4所述的一种机器人,其特征在于:
6.一种机器人行走控制方法,其特征在于,包括如下步骤:
7.根据权利要求6所述的一种机器人行走控制方法,其特征在于:
8.根据权利要求7所述的一种机器人行走控制方法,其特征在于:
9.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质用于存储计算机指令,当其在计算机上运行时,使得计算机执行如权利要求6-8任一项所述的机器人行走控制方法。
10.一种基于信号特征变化的机器人行走控制设备,其特征在于,包括处理器以及存储器;
技术总结
本发明提供了机器人及机器人行走控制方法、存储介质和设备,包括悬挂部、机器主体以及检测部,检测部包括一组障碍识别单元,障碍识别单元包括至少一个近距离障碍识别单元,近距离障碍识别单元用于判断在指定识别方向的第二距离内是否存在障碍物;机器主体上设置有至少两组障碍识别单元,两组障碍识别单元相背设置,两组识别单元分别沿第一方向和第二方向设置;其中,第一方向与第二方向夹角为0°‑90°。使用本申请提供的一种机器人能够对多方向的远距离、近距离的障碍物进行识别判断,其识别判断操作更加具有针对性,其上传的有关障碍物的距离数据也更加精准。
技术研发人员:何进江,陈刚,朱彬,陈华军,章栋,王刚,陶敏,李华,李小壮,舒萍萍
受保护的技术使用者:三峡金沙江川云水电开发有限公司
技术研发日:
技术公布日:2024/11/18
技术研发人员:何进江,陈刚,朱彬,陈华军,章栋,王刚,陶敏,李华,李小壮,舒萍萍
技术所有人:三峡金沙江川云水电开发有限公司
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除