一种基于全制动过程监督的紧密追踪列车群动态安全间隔界定方法
本发明属于轨道交通,具体涉及基于全制动过程监督的紧密追踪列车群动态安全间隔计算方法。
背景技术:
1、目前,我国轨道交通发展已经达到全球领先水平,运输服务能力和水平得到了显著提升。为了应对不断增长的轨道交通运输需求,“虚拟编组”、“虚拟联挂”等列车运营模式逐渐成为研究的焦点,并在铁路行业内逐步引起关注。这一系列概念的提出旨在通过建立列车与列车之间的快速无线通信同步行车信息,从而将列车运行间隔缩短至相对制动距离,并最终形成紧密追踪列车群/编队。
2、当前关于紧密追踪列车群/编队内列车间的安全间隔的研究主要依赖于列车制动停车点监督,并且建立在过于简化的列车运行条件假设之上。因此,目前既有的紧密追踪列车群/编队安全间隔确定方法存在着增加列车在实际运行中的碰撞风险的问题。为确保紧密追踪列车群/编队“短距离”(相对制动距离)追踪运行模式下的安全运行,迫切需要研究一种基于全制动过程监督的、考虑列车实际运行条件的紧密追踪列车群/编队动态安全间隔界定方法。
技术实现思路
1、本发明的目的在于针对现有技术存在的不足,提出一种基于全制动过程监督的紧密追踪列车群/编队动态安全间隔界定方法。该方法可应用于紧密追踪列车群/编队运营模式下的列车安全间隔的动态确定从而确保安全防护。通过此方法,能够显著提升紧密追踪列车群/编队安全间隔确定方法的安全性和鲁棒性,有效推动列车紧密追踪技术的安全应用。
2、为达到上述目的,本发明采用的技术方案是:
3、一种基于全制动过程监督的紧密追踪列车群动态安全间隔界定方法,包括以下步骤:
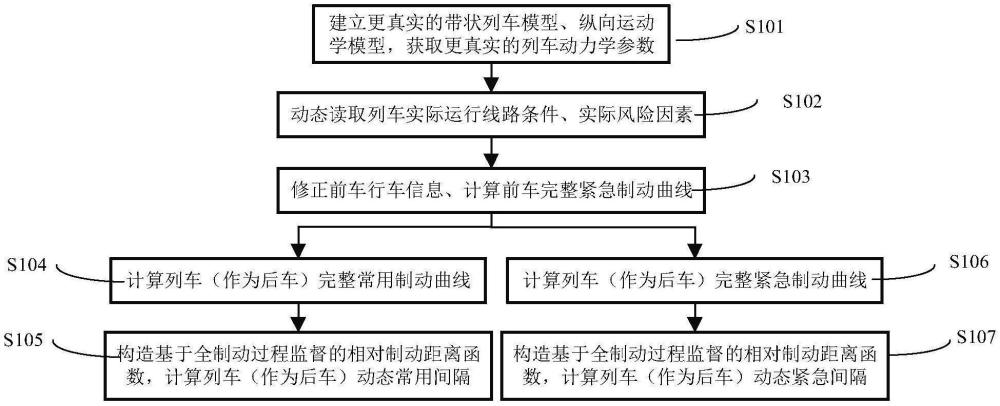
4、步骤s101:建立带状列车模型、纵向运动学模型,获取列车动力学参数;
5、所述带状列车模型利用变坡点、变曲率点等引起列车线路条件突变的节点,将具有一定长度的列车划分为若干段列车带;
6、步骤s102:动态读取列车实际运行线路条件、实际风险因素;
7、所述实际运行线路条件包括但不限于列车运行基本阻力、坡道阻力、曲线阻力、隧道阻力;
8、所述实际风险因素包括但不限于列车异质性、通信延迟、制动延迟、定位误差、测速误差;
9、步骤s103:修正前车行车信息、计算前车完整紧急制动曲线;
10、步骤s104:计算后车完整常用制动曲线;
11、步骤s105:构造基于全制动过程监督的相对制动距离函数,计算后车动态常用间隔;
12、步骤s106:计算后车完整紧急制动曲线;
13、步骤s107:构造基于全制动过程监督的相对制动距离函数,计算后车动态紧急间隔。
14、进一步的说明如下:
15、1)在紧密追踪列车群/编队运行过程中,基于带状列车模型、实际运行线路条件以及实际风险因素,构造基于紧密追踪列车群/编队内列车及其前行列车的全制动过程监督的相对制动距离函数,计算紧密追踪列车群/编队内列车间的动态安全间隔。
16、所述紧密追踪为两相邻列车通过一定的通信技术实现基于相对制动距离的追踪运行模式,包括但不限于虚拟编组、虚拟耦合、虚拟联挂、虚拟重联等运行模式/制式。
17、所述通信包括但不限于车-车通信和车-地通信。
18、所述紧密追踪列车群/编队(以下简称紧追踪列车群)为同一轨道上具有相同运行方向的连续两列或两列以上紧密追踪的列车组成的列车群或列车编队。
19、所述前行列车(以下简称前车)为紧追踪列车群内任一列车的运行前方最邻近的另一列车。
20、所述全制动过程包括列车完整的常用制动曲线、完整的紧急制动曲线以及其前行列车的完整的紧急制动曲线;
21、所述动态安全间隔包括动态常用间隔和动态紧急间隔;
22、所述动态常用间隔由考虑实际运行线路条件和实际风险因素的情况下完整的列车常用制动曲线和完整的前车紧急制动曲线确定;
23、所述动态紧急间隔由考虑实际运行线路条件和实际风险因素的情况下完整的列车紧急制动曲线和完整的前车紧急制动曲线确定。
24、2)所述带状列车模型将具有一定长度和质量完整列车划分为若干具有一定长度和质量的列车带。
25、所述列车带的划分由列车所占用的线路范围内的变坡点、变曲率点等引起列车线路条件突变的节点确定。所确定的每一列车带均根据其自身的质量、长度及其所占用的实际线路范围具有独立的坡道阻力和曲线阻力。
26、所述列车所占用的线路范围为列车车尾位置至列车车头位置所覆盖的线路长度范围。
27、所述变坡点为线路坡度值变化的位置。
28、所述变曲率点为线路曲率值发生变化的位置。
29、3)所述实际运行线路条件包括但不限于列车运行基本阻力、坡道阻力、曲线阻力、隧道阻力。
30、所述实际风险因素包括但不限于列车异质性、通信延迟、制动延迟、定位误差、测速误差。
31、所述列车异质性表示列车在牵引特性、制动特性、车辆特性等可以对列车运行产生影响的列车特性上的差异性。
32、所述牵引特性包括但不限于列车牵引功率、最大牵引力与速度的关系曲线(或函数)。
33、所述制动特性包括常用制动特性和紧急制动特性;
34、所述常用制动特性为列车的常用制动率与列车速度大小的关系曲线(或函数);
35、所述紧急制动特性为列车的紧急制动率与列车速度大小的关系曲线(或函数)。
36、所述车辆特性包括但不限于列车车身长度、静态质量、动车和拖车数量、动车和拖车的转动惯量系数。
37、所述通信延迟为列车的前车发出行车信息的时刻至列车接收到该信息时刻的时间间隔。
38、所述行车信息包括但不限于列车运行方向、位置、速度、加速度信息。
39、所述制动延迟包括但不限于由于惯性列车控制器的滞后时延、列车实施常用制动或紧急制动过程中可能存在的制动系统反应时延、牵引力切除时延、惰行阶段时延和制动力建立时延。
40、4)所述全制动过程包括列车(作为后车)完整的常用制动曲线、完整的紧急制动曲线以及其前车的完整紧急制动曲线。
41、所述相对制动距离函数包括关于列车(作为后车)完整常用制动曲线以及其前车的完整紧急制动曲线的函数;
42、所述相对制动距离函数也包括关于列车(作为后车)完整紧急制动曲线以及其前车的完整的紧急制动曲线的函数;
43、5)所述动态安全间隔包括动态常用间隔和动态紧急间隔。
44、所述动态常用间隔为假设前车发出行车信息后立即发生无线通信故障并进入紧急制动的情况下(以下称为安全侧假设),列车(作为后车)采用符合安全制动模型的常用制动仍能进行安全制动并不发生碰撞所需的最小的列车车头位置至其前车车尾位置之间的间隔。
45、所述动态紧急间隔为在所述安全侧假设下,列车(作为后车)采用符合安全制动模型的紧急制动才能进行安全制动并不发生碰撞所需的最小的列车车头位置至其前车车尾位置之间的间隔。
46、所述安全制动模型为ieee 1474.1中规定的cbtc系统下的列车经典制动模型;
47、6)所述列车动态安全间隔界定方法除了在紧追踪列车群运行过程中进行列车动态安全间隔的实时界定,还可包括但不限于用于计算和生成紧追踪列车群运行前的车群内每两相邻列车未来一定位置/时间期间内的目标间隔曲线;
48、所述目标间隔曲线为紧追踪列车群内任一列车从当前位置(例如当前车站)或时刻,至该列车将来所处的某一位置(例如目的车站)或时刻,该列车与其前车在该期间任一位置或时刻所需保持的目标间隔;
49、所述任一列车不包括紧追踪列车群运行方向上的第一列车。
50、有益效果
51、本发明为紧追踪运行列车群/编队的动态安全间隔的计算和界定提出了新方法,由于实现了列车全制动过程监督且考虑了更真实的列车运行条件、列车模型和风险因素,而非仅仅采用列车制动停车点监督和过于简化的列车运行条件和模型,故大大提高了紧追踪运行列车群/编队内列车间的安全间隔计算的安全性和鲁棒性,同时,也能为列车紧密追踪运行过程中的安全间隔界定提供有效的参考,并进一步推动列车紧密追踪技术在铁路行业的进一步发展和应用。
技术研发人员:欧冬秀,纪玉清,王子玮,张雷
技术所有人:同济大学
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除