一种无人驾驶新能源卡车式撒料车及其撒料作业方法与流程
本发明涉及农牧业无人撒料设备,具体涉及一种无人驾驶新能源卡车式撒料车及其撒料作业方法。
背景技术:
1、现有撒料车多采用燃油动力,噪声大、环境污染大,容易造成动物应激反应影响正常生长发育和产奶的情况;同时现有撒料车需要专人驾驶,人员成本高;并且工作环境差,影响着现场工作人员的身体健康。并且撒料车撒料作业时车辆速度和撒料只能人为控制,导致撒料均匀度低。
2、因此,我们提出一种无人驾驶新能源卡车式撒料车及其撒料作业方法,以解决上述问题。
技术实现思路
1、针对现有技术中的缺陷,本发明提供一种无人驾驶新能源卡车式撒料车及其撒料作业方法,以降低人为操作带了的不利影响。
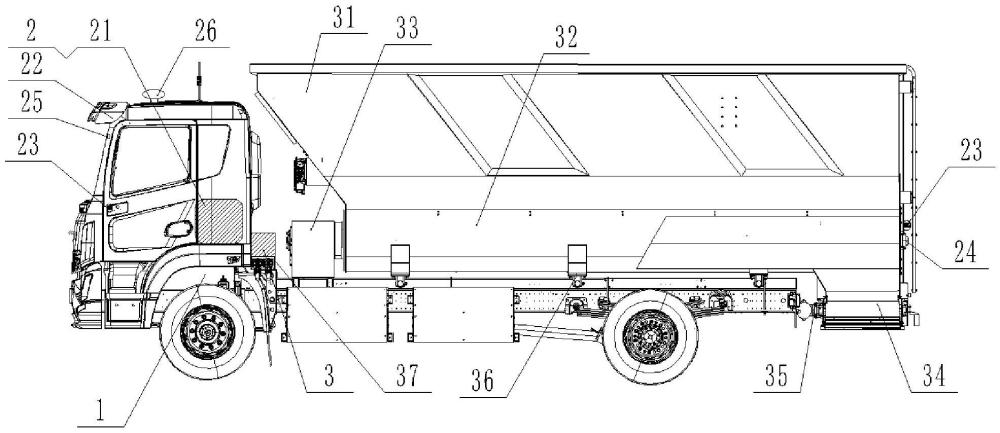
2、第一方面,本发明提供的一种无人驾驶新能源卡车式撒料车,包括:主车体,无人驾驶控制系统和上装系统;其中所述无人驾驶控制系统设置在所述主车体的驾驶室处;所述上装系统设置在所述主车体的底盘处;所述主车体为电动车,其中所述无人驾驶控制系统用于控制所述主车体行驶;所述上装系统包括箱体,所述箱体内装有待抛撒物料,并将待抛撒物料从箱体输送至卸料皮带驱动总成。
3、进一步的,所述无人驾驶控制系统包括自动驾驶域控制器、综合惯导系统、激光雷达、摄像头和5g路由器;所述自动驾驶域控制器分别与所述综合惯导系统、激光雷达、摄像头和5g路由器电连接。
4、进一步的,所述上装系统还包括输送搅龙、输送搅龙电机总成;所述输送搅龙设置在所述箱体内;且所述输送搅龙电机总成设置在所述主车体的底盘上,并延伸进所述箱体内,其中所述输送搅龙电机总成与所述输送搅龙传动连接,并驱动所述输送搅龙转动;所述输送搅龙用于输送抛撒物料至卸料皮带,并通过卸料皮带驱动总成驱动皮带抛撒物料。
5、进一步的,所述上装系统还包括卸料皮带和卸料皮带驱动总成;所述卸料皮带驱动总成设置在所述箱体后侧下方;所述卸料皮带设置在述主车体的底盘后侧,且与所述卸料皮带驱动总成传动连接。
6、进一步的,所述上装系统还包括称重传感器;所述称重传感器安装在所述箱体上,并用于对所述箱体内的抛撒物料进行称重。
7、进一步的,所述上装系统还包括上装控制器;所述上装控制器分别与所述称重传感器、卸料皮带驱动总成和输送搅龙电机总成电连接。
8、进一步的,所述上装控制器与所述无人驾驶控制系统电连接。
9、由上述技术方案可知,本发明提供的一种无人驾驶新能源卡车式撒料车的有益效果:
10、本发明采用的新能源电动卡车,其新能源卡车底盘为线控底盘,该设备提高了车辆的控制精度,保证车辆运行安全。并且线控新能源卡车底盘,具备更好的通过能力、载重能力和行驶速度,提高车辆作业效率。同时新能源卡车采用高容量动力电池,保证了作业续航时间;电池采用下挂式安装,保证底盘具有更大的平整性,提供更大的上装设备的空间。
11、第二方面,一种撒料作业控制方法,其特征在于,包括如下步骤:
12、步骤一,称重;通过所述称重传感器将信息上传至所述上装控制器;
13、步骤二,控制行驶速度,根据物料总重量w、撒料效率e、撒料距离d、主车体速度vmax条件根据pid方式,计算出车辆的实时速度,其中所述无人驾驶系统控制车辆按照这个速度行驶,且算法为:
14、且v(t)≤vmax;
15、其中所述步骤二中的主车体速度vmax,是主车体行驶的最高速度。
16、由上述技术方案可知,本发明提供的一种撒料作业控制方法的有益效果:实际运用中,通过无人驾驶系统和上装控制器之间的实时通讯,实现了撒料车的无人撒料作业,提高了撒料作业的效率,降低人员的工作强度和管理成本。还能够通过无人驾驶系统和上装控制器采集的称重传感器数据的实时交互控制,实现了撒料作业与车辆速度的联动,提高了撒料均匀度。无人驾驶新能源卡车式撒料车通过云服务器与后台的生产管理系统进行通讯,实现了生产管理系统任务自动下发,无人驾驶新能源卡车式撒料车自动完成相应任务的能力。
技术特征:
1.一种无人驾驶新能源卡车式撒料车,其特征在于,包括:主车体,无人驾驶控制系统和上装系统;其中所述无人驾驶控制系统设置在所述主车体的驾驶室处;所述上装系统设置在所述主车体的底盘处;
2.根据权利要求1所述的一种无人驾驶新能源卡车式撒料车,其特征在于,所述无人驾驶控制系统包括自动驾驶域控制器、综合惯导系统、激光雷达、摄像头和5g路由器;所述自动驾驶域控制器分别与所述综合惯导系统、激光雷达、摄像头和5g路由器电连接。
3.根据权利要求1所述的一种无人驾驶新能源卡车式撒料车,其特征在于,所述上装系统还包括输送搅龙、输送搅龙电机总成;所述输送搅龙设置在所述箱体内;且所述输送搅龙电机总成设置在所述主车体的底盘上,并延伸进所述箱体内,其中所述输送搅龙电机总成与所述输送搅龙传动连接,并驱动所述输送搅龙转动;所述输送搅龙用于输送抛撒物料。
4.根据权利要求1所述的一种无人驾驶新能源卡车式撒料车,其特征在于,所述上装系统还包括卸料皮带和卸料皮带驱动总成;所述卸料皮带驱动总成设置在所述箱体内;所述卸料皮带电机总成设置在述主车体的底盘上,并延伸进所述箱体内,且与所述卸料皮带驱动总成传动连接。
5.根据权利要求1所述的一种无人驾驶新能源卡车式撒料车,其特征在于,所述上装系统还包括称重传感器;所述称重传感器安装在所述车体上,并用于对所述箱体内的抛撒物料进行称重。
6.根据权利要求5所述的一种无人驾驶新能源卡车式撒料车,其特征在于,所述上装系统还包括上装控制器;所述上装控制器分别与所述称重传感器、卸料皮带电机总和输送搅龙电机总成电连接。
7.根据权利要求5所述的一种无人驾驶新能源卡车式撒料车,其特征在于,所述上装控制器与所述无人驾驶控制系统电连接。
8.一种撒料作业控制方法,其特征在于,包括如下步骤:
技术总结
本发明属于农牧业无人撒料设备技术领域,提供了一种无人驾驶新能源卡车式撒料车及其撒料作业方法。本发明的一种无人驾驶新能源卡车式撒料车,其特征在于,包括:主车体,无人驾驶控制系统和上装系统;其中所述无人驾驶控制系统设置在所述主车体的驾驶室处;所述上装系统设置在所述主车体的底盘处;所述主车体为电动车,其中所述无人驾驶控制系统用于控制所述主车体行驶;所述上装系统包括箱体输送搅龙、输送搅龙电机总成、卸料皮带、卸料驱动总成,所述箱体内装有待抛撒物料,并通过输送搅龙、卸料皮带将待抛撒物料从箱体内抛撒出。本发明的撒料作业控制方法,包括如下步骤:步骤一,称重;步骤二,控制行驶速度。
技术研发人员:张青,周宁波,崔伟明,关金森,张永国,张闪闪
受保护的技术使用者:北京国科诚泰农牧设备有限公司
技术研发日:
技术公布日:2024/11/18
技术研发人员:张青,周宁波,崔伟明,关金森,张永国,张闪闪
技术所有人:北京国科诚泰农牧设备有限公司
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除