多雷达测试系统及测试方法与流程
本申请涉及雷达测试,具体涉及一种多雷达测试系统及测试方法。
背景技术:
1、目前对于雷达的测试工作而言,单台雷达测试往往不能满足规模生产需求,而多雷达测试过程中,周边环境干扰、多雷达测试工位之间的相互干扰,会影响多雷达测试结果的稳定性,从而导致雷达测试不准确,相关技术中为了规避这些干扰,往往会在每个雷达工位上加装微波辐射屏蔽箱,但这会极大增加测试成本,并且大幅增加测试时间,这种情况需要改变。
技术实现思路
1、鉴于此,本申请提供一种多雷达测试系统及测试方法,以解决现有的多雷达测试易相互干扰,测试稳定性不高的问题。
2、为实现以上目的,根据第一方面,采用的技术方案为:
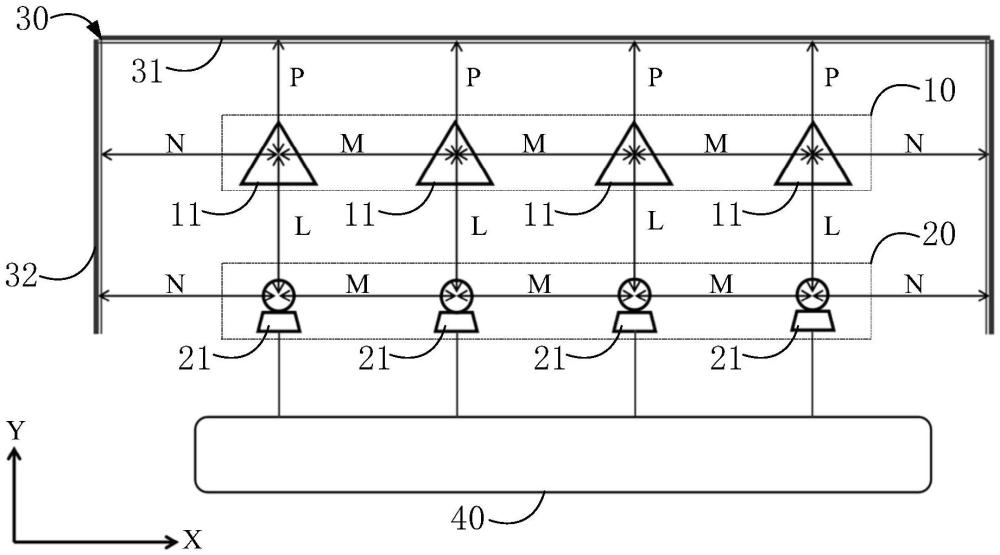
3、一种多雷达测试系统,应用时对待测雷达进行批量测试,包括:角反阵列,包括若干个角反单元,若干个所述角反单元沿第一方向等间距的呈线性排列,相邻的所述角反单元间具有第一设定距离;雷达转台阵列,包括若干个雷达转台,若干个所述雷达转台沿第一方向等间距的呈线性排列,每一所述雷达转台均连接有所述待测雷达,其中,在与所述第一方向相垂直的第二方向上,所述雷达转台阵列与所述角反阵列具有第二设定距离;隔板组,保持有距离的绕设于所述角反阵列和所述雷达转台阵列的外侧;测试控制装置,与所述雷达转台阵列和所述待测雷达连接,获取所述雷达转台的方位角和俯仰角信息并控制所述雷达转台转动,以及控制所述待测雷达发射和接收信号。
4、本申请进一步设置为:相邻的所述雷达转台间具有所述第一设定距离,所述第一设定距离≥1.2倍的所述第二设定距离。
5、本申请进一步设置为:所述测试控制装置控制所述待测雷达发射和接收信号,且任意两台或多台所述待测雷达的发射和接收信号时间段无交叠。
6、本申请进一步设置为:所述隔板组包括第一隔板和第二隔板,所述第一隔板在所述第一方向上平行于所述角反阵列,且与所述角反阵列具有第一平行距离,所述第二隔板在所述第二方向上平行于所述角反阵列和所述雷达转台阵列,且与所述角反阵列和所述雷达转台阵列具有第二平行距离。
7、本申请进一步设置为:所述第一平行距离≥2/3倍的所述第二设定距离。
8、本申请进一步设置为:所述第二平行距离≥所述第一设定距离。
9、本申请进一步设置为:所述第一方向和所述第二方向构成一参考面,所述角反单元和所述雷达转台在所述参考面上的投影连线呈直角四边形网格。
10、本申请进一步设置为:所述角反单元的角反面垂直于所述第二方向,在所述雷达转台的方位角和俯仰角均为0°时,所述待测雷达的雷达面垂直于所述第二方向,以及平行于所述角反单元的角反面。
11、本申请进一步设置为:还包括测试底座,所述角反阵列和所述雷达转台阵列均连接在所述测试底座上,其中,所述角反阵列和所述雷达转台阵列等高,所述角反阵列或所述雷达转台阵列相对于所述测试底座的高度≥所述第一设定距离。
12、根据第二方面,采用的技术方案为:
13、一种多雷达测试方法,应用于前述实施例任一项所述的多雷达测试系统,包括:
14、搭建多雷达测试环境且调试所述多雷达测试系统;
15、在每一所述雷达转台上对应装载待测雷达;
16、控制每一雷达转台调整至同一预设角度,所述预设角度包括方位角和俯仰角;
17、检查所述雷达转台的实时角度与所述预设角度的差值在设定阈值范围内后,控制任意两台或多台所述待测雷达,顺序收发或分时并行收发的进行所述待测雷达的发射和接收信号动作,并做数据处理;
18、将所述雷达转台的方位角和俯仰角回调至0°后,收回所述待测雷达。
19、综上所述,与现有技术相比,本申请公开了一种多雷达测试系统及测试方法,多雷达测试系统包括角反阵列、雷达转台阵列、隔板组和测试控制装置,其中,若干个角反单元沿第一方向等间距的呈线性排列以构建角反阵列,且相邻的角反单元间具有第一设定距离,若干个搭载待测雷达的雷达转台沿第一方向等间距的呈线性排列以构建雷达转台阵列,且在与第一方向相垂直的第二方向上,雷达转台阵列与角反阵列具有第二设定距离,同时,隔板组保持有距离的绕设于角反阵列和雷达转台阵列的外侧,测试控制装置与雷达转台阵列和待测雷达连接,并控制雷达转台转动,以及控制待测雷达发射和接收信号。即通过上述设置,本申请解决多雷达测试易相互干扰,测试稳定性不高的问题,提高了多雷达测试效率。
技术特征:
1.一种多雷达测试系统,应用时对待测雷达进行批量测试,其特征在于,包括:
2.如权利要求1所述的多雷达测试系统,其特征在于,相邻的所述雷达转台间具有所述第一设定距离,所述第一设定距离≥1.2倍的所述第二设定距离。
3.如权利要求1所述的多雷达测试系统,其特征在于,所述测试控制装置控制所述待测雷达发射和接收信号,且任意两台或多台所述待测雷达的发射和接收信号时间段无交叠。
4.如权利要求1所述的多雷达测试系统,其特征在于,所述隔板组包括第一隔板和第二隔板,所述第一隔板在所述第一方向上平行于所述角反阵列,且与所述角反阵列具有第一平行距离,所述第二隔板在所述第二方向上平行于所述角反阵列和所述雷达转台阵列,且与所述角反阵列和所述雷达转台阵列具有第二平行距离。
5.如权利要求4所述的多雷达测试系统,其特征在于,所述第一平行距离≥2/3倍的所述第二设定距离。
6.如权利要求4所述的多雷达测试系统,其特征在于,所述第二平行距离≥所述第一设定距离。
7.如权利要求1所述的多雷达测试系统,其特征在于,所述第一方向和所述第二方向构成一参考面,所述角反单元和所述雷达转台在所述参考面上的投影连线呈直角四边形网格。
8.如权利要求1所述的多雷达测试系统,其特征在于,所述角反单元的角反面垂直于所述第二方向,在所述雷达转台的方位角和俯仰角均为0°时,所述待测雷达的雷达面垂直于所述第二方向,以及平行于所述角反单元的角反面。
9.如权利要求1所述的多雷达测试系统,其特征在于,还包括测试底座,所述角反阵列和所述雷达转台阵列均连接在所述测试底座上,其中,所述角反阵列和所述雷达转台阵列等高,所述角反阵列或所述雷达转台阵列相对于所述测试底座的高度≥所述第一设定距离。
10.一种多雷达测试方法,应用于如权利要求1-9任一项所述的多雷达测试系统,其特征在于,包括:
技术总结
本申请涉及雷达测试技术领域,公开了一种多雷达测试系统及测试方法,多雷达测试系统包括:角反阵列,包括若干个角反单元,若干个角反单元沿第一方向等间距的呈线性排列,相邻的角反单元间具有第一设定距离;雷达转台阵列,包括若干个雷达转台,每一雷达转台均连接有待测雷达,若干个雷达转台沿第一方向等间距的呈线性排列,且在与第一方向相垂直的第二方向上与角反阵列具有第二设定距离;隔板组,保持有距离的绕设于角反阵列和雷达转台阵列的外侧;测试控制装置,与雷达转台阵列和待测雷达连接,用于控制雷达转台转动,以及控制待测雷达发射和接收信号。本申请提高多雷达测试的稳定性和测试效率。
技术研发人员:彭刚,潘攀,鲁宏涛,邹建发,张庆,林郁
受保护的技术使用者:珠海正和微芯科技有限公司
技术研发日:
技术公布日:2024/11/14
技术研发人员:彭刚,潘攀,鲁宏涛,邹建发,张庆,林郁
技术所有人:珠海正和微芯科技有限公司
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除