一种导向机构及介入机器人从端装置的制作方法
本申请涉及高端医疗装备,具体涉及一种导向机构及介入机器人从端装置。
背景技术:
1、医疗机器人因其精准稳定、安全高效等优势,正在为传统医学领域带来颠覆性的变革。血管介入技术是一项新兴的心脑血管疾病诊疗手段,医生在医学影像的引导下,通过导管沿血管腔直接到达体内病变部位(如冠状动脉和脑部、肝脏、肾脏等部位的血管),然后利用导管输送诊疗剂或手术器械(如球囊、支架、弹簧圈等),对体内较远的病变实施微创性诊断和治疗。
2、血管介入手术作为微创手术的一种,避免了开腔和开颅的手术方式,从而降低手术风险,减轻病人痛苦。同时,术后并发症少、恢复周期短,所以血管介入手术机器人成为高端医疗装备领域的研发热点。
3、目前血管介入手术机器人主要采用主从操作结构。医生位于手术室外操作主端机器人,从而控制机器人对人体进行手术,主从式操作结构有效避免了x射线对医生的辐射影响,利用机器人固有的操作精度和准确度实施手术。
4、在进行介入手术时,需要先将导管鞘穿刺到人体内,再将导引导管从导管鞘穿入进而进入人体内部。现如今通过介入手术机器人进行手术时,由于导管自身较软,为了提高对导管的操作精度,通常令导管操作模块与导管鞘的距离降到最小,但此时在对导管操作模块进行操作时,导管的运动会令导管鞘产生微小抖动,大大增加了手术的操作风险。
技术实现思路
1、鉴于现有技术中的上述缺陷或不足,本申请旨在提供一种导向机构及介入机器人从端装置,包括:
2、第一管道,所述第一管道内具有第一通道,所述第一通道内用于放置导管;
3、导向组件,所述导向组件具有第二通道,所述导向组件沿第一方向具有第一端;所述导向组件包括穿刺部和设于所述穿刺部靠近所述第一端的导流部,所述导流部与与所述穿刺部垂直;
4、连接组件,所述连接组件一端与所述第一管道可拆卸连接,远离所述第一管道侧设有第一空间,所述导向组件靠近所述第一端侧嵌入所述第一空间,所述连接组件还设有与所述第一空间连通的第五通道,所述第一通道、所述第五通道、所述第一空间、所述第二通道连通。
5、根据本申请实施例提供的技术方案,所述连接组件包括第一连接件,所述第一连接件靠近所述导向组件侧设有第一夹持部与第一锁紧部,所述第一夹持部用于夹紧所述穿刺部,所述第一锁紧部用于锁定所述导流部,所述第一夹持部与所述第一锁紧部形成所述第一空间。
6、根据本申请实施例提供的技术方案,所述第一锁紧部靠近所述导向组件端沿第二方向设有第一开口,所述第二方向与所述第一方向垂直,所述导流部可嵌入所述第一开口。
7、根据本申请实施例提供的技术方案,所述第一锁紧部沿所述第一方向一端设有第二开口,所述导流部贯穿所述第二开口。
8、根据本申请实施例提供的技术方案,所述第一连接件包括第一平台,所述第一平台中部具有所述第五通道,所述第一夹持部包括周向分布于所述第一平台靠近所述导向组件端的三个第一挡板,所述第一挡板沿所述第一方向长度小于所述第一锁紧部的长度,三个所述第一挡板与所述第一锁紧部形成所述第一空间。
9、根据本申请实施例提供的技术方案,所述连接组件包括第三连接件,所述第三连接件包括设于靠近所述第一管道侧的第一固定端,所述第一固定端远离所述第一管道侧设有第三夹持部,所述第一固定端中部设有第三通道,所述第三通道与所述第三夹持部连通,所述第三通道与所述第三夹持部形成所述第一空间;所述第三连接件还包括套设于所述第一固定端外壁的第三锁紧部,所述第三锁紧部与所述第一固定端可移动连接。
10、根据本申请实施例提供的技术方案,所述第三夹持部包括多个周向分布于所述第一固定端靠近所述穿刺部侧的第三夹持杆,多个所述第三夹持杆形成第一空间,所述第一空间沿所述第一方向由向靠近所述导向组件端向靠近所述第一管道端内径逐渐减小。
11、根据本申请实施例提供的技术方案,相邻两个所述第三夹持夹持杆之间具有第一空隙,所述导流部贯穿所述第一空隙。
12、一种推动装置,所述介入机器人从端装置包括所述导向机构。
13、根据本申请实施例提供的技术方案,所述介入机器人包括基座本体,所述基座本体与所述靠近所述第一管道侧设有第二连接组件,所述第二连接组件用于连接所述导向机构与所述基座本体。
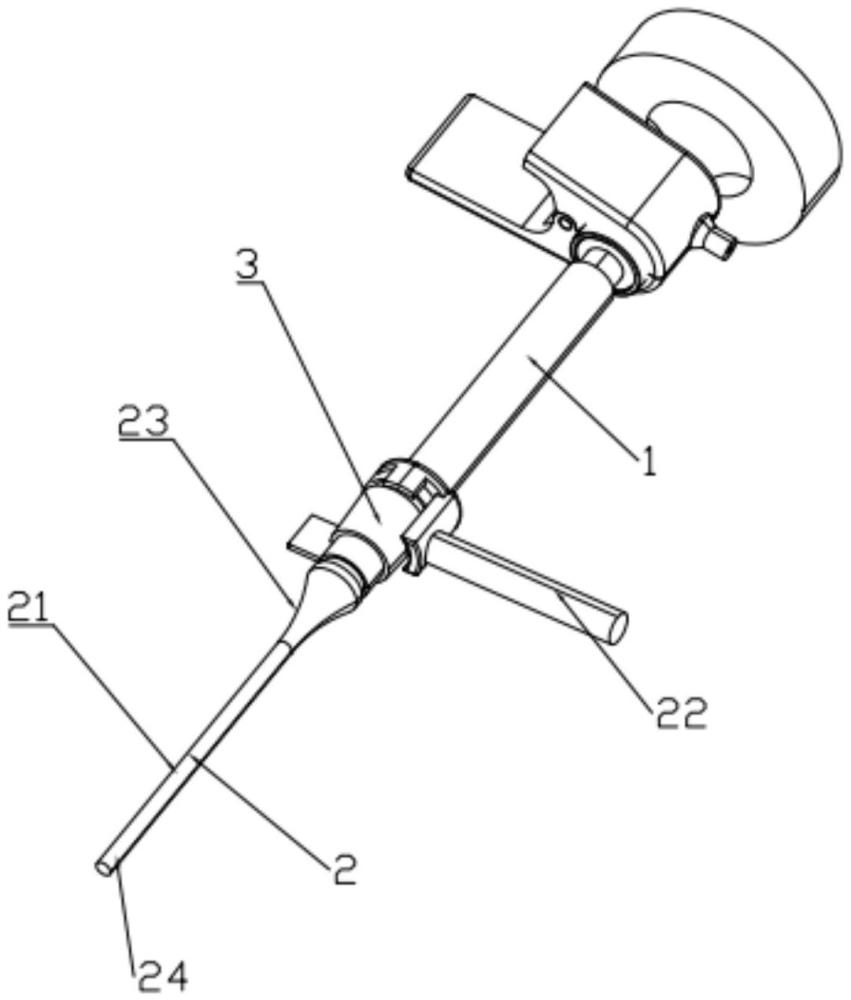
14、综上所述,本申请提出一种导向机构及介入机器人从端装置,包括:第一管道,第一管道具有第一通道;导向组件,导向组件具有第二通道,导向组件沿第一方向具有第一端,导向组件靠近第一端侧具有导流部;还包括连接组件,连接组件一端与第一管道可拆卸连接,另一端具有第一空间,第一端可插入第一端;连接组件还设有与第一空间连通的第五通道;导管由第一通道进入第五通道后进入第一空间,最后由第二通道伸出;本方案中连接组件连接第一管道与导向组件,避免第一管道直接套在导向组件一端,防止导管在第一管道内运动过程中产生的抖动影响导向组件的运动,连接组件对导向组件的位置进行了固定。
技术特征:
1.一种导向机构,其特征在于,包括:
2.根据权利要求1所述的导向机构,其特征在于:所述连接组件(3)包括第一连接件(31),所述第一连接件(31)靠近所述导向组件(2)侧设有第一夹持部(312)与第一锁紧部(313),所述第一夹持部(312)用于夹紧所述穿刺部(21),所述第一锁紧部(313)用于锁定所述导流部(22),所述第一夹持部(312)与所述第一锁紧部(313)形成所述第一空间(4)。
3.根据权利要求2所述的导向机构,其特征在于:所述第一锁紧部(313)靠近所述导向组件(2)端沿第二方向设有第一开口(3131),所述第二方向与所述第一方向垂直,所述导流部(22)可嵌入所述第一开口(3131)。
4.根据权利要求2所述的导向机构,其特征在于:所述第一锁紧部(313)沿所述第一方向一端设有第二开口(3133),所述导流部(22)贯穿所述第二开口(3133)。
5.根据权利要求3所述的导向机构,其特征在于:所述第一连接件(31)包括第一平台(3121),所述第一平台(3121)中部具有所述第五通道(5),所述第一夹持部(312)包括周向分布于所述第一平台(3121)靠近所述导向组件(2)端的三个第一挡板(311),所述第一挡板(311)沿所述第一方向长度小于所述第一锁紧部(313)的长度,三个所述第一挡板(311)与所述第一锁紧部(313)形成所述第一空间(4)。
6.根据权利要求1所述的导向机构,其特征在于:所述连接组件(3)包括第三连接件(33),所述第三连接件(33)包括设于靠近所述第一管道(1)侧的第一固定端(331),所述第一固定端(331)远离所述第一管道(1)侧设有第三夹持部(332),所述第一固定端(331)中部设有第三通道,所述第三通道与所述第三夹持部(332)连通,所述第三通道与所述第三夹持部(332)形成所述第一空间(4);所述第三连接件(33)还包括套设于所述第一固定端(331)外壁的第三锁紧部(333),所述第三锁紧部(333)与所述第一固定端(331)可移动连接。
7.根据权利要求6所述的导向机构,其特征在于:所述第三夹持部(332)包括多个周向分布于所述第一固定端(331)靠近所述穿刺部(21)侧的第三夹持杆(3321),多个所述第三夹持杆(3321)形成所述第一空间(4),所述第一空间(4)沿所述第一方向由向靠近所述导向组件(2)端向靠近所述第一管道(1)端内径逐渐减小。
8.根据权利要求7所述的导向机构,其特征在于:相邻两个所述第三夹持杆(3321)之间具有第一空隙(3323),所述导流部(22)贯穿所述第一空隙(3323)。
9.一种介入机器人从端装置,其特征在于:所述介入机器人包括如权利要求1-8任意一项所述的导向机构(6)。
10.根据权利要求9所述的介入机器人从端装置,其特征在于:所述介入机器人包括基座本体(7),所述基座本体(7)与所述靠近所述第一管道(1)侧设有第二连接组件(8),所述第二连接组件(8)用于连接所述导向机构(6)与所述基座本体(7)。
技术总结
本申请提供一种导向机构及介入机器人从端装置,包括:具有第一通道的第一管道,第一通道内用于放置导管;导向组件,导向组件具有第二通道,导向组件沿第一方向具有第一端;导向组件包括穿刺部和设于穿刺部靠近第一管道端的导流部,导流部与与穿刺部垂直;连接组件,连接组件一端与第一管道可拆卸连接,远离第一管道侧设有第一空间,导向组件靠近第一端侧嵌入第一空间,连接组件还设有与第一空间连通的第五通道,第一通道、第五通道、第一空间、第二通道连通;本方案中连接组件连接第一管道与导向组件,避免第一管道直接套在导向组件一端,防止导管在第一管道内运动过程中产生的抖动影响导向组件的运动,连接组件对导向组件的位置进行了固定。
技术研发人员:田富强,王新宇
受保护的技术使用者:北京福之曼机器人科技有限公司
技术研发日:20240118
技术公布日:2024/11/21
技术研发人员:田富强,王新宇
技术所有人:北京福之曼机器人科技有限公司
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除