一种智能搬运机器人的制作方法
本发明涉及搬运设备,具体为一种智能搬运机器人。
背景技术:
1、随着自动化和智能化技术的迅速发展,工业生产、仓储物流等领域对于高效、灵活的物料搬运解决方案的需求日益增长。传统的物料搬运主要依赖人工操作,不仅效率低下,且容易出错,增加了企业的运营成本和人力资源负担。特别是在一些重复性高、劳动强度大或环境条件恶劣的场合,如重型零件搬运、危险品处理、高架仓库物料转移等,对搬运机器人的需求更为迫切。
2、早期的搬运机器人设计往往功能单一,仅能完成简单的直线或平面移动,对于复杂形状、不同尺寸的物件适应性较差,且在精准定位、夹持稳定性和智能化控制方面存在局限。此外,维护和调整这些机器人的工作参数和夹具配置通常需要专业技术人员进行,操作复杂度较高,限制了其在实际生产中的广泛应用。
3、为了解决上述问题,市场上逐渐出现了具备一定智能功能的搬运机器人,它们开始尝试集成更先进的传感器、控制系统和灵活的夹持机构,以期实现更广泛的适应性和更高的作业效率。然而,这些机器人在设计上仍然面临着诸多挑战,如如何实现精准的物体抓取以及如何快速适应不同工件的尺寸和形状变化等,这些都是制约其技术进步和市场普及的关键因素。
4、因此,开发一种能够综合考虑作业灵活性、易于维护与调节的智能搬运机器人,成为了当前行业发展的迫切需求,这类机器人需要具备高度模块化和可重构性,以便快速适应不同的生产环境和搬运任务,确保在复杂场景下的作业精度和安全性。
技术实现思路
1、针对现有技术的不足,本发明提供了一种智能搬运机器人,解决了现有搬运装置可调节性以及通用性不佳,无法适应不同工况需求的问题。
2、为实现以上目的,本发明通过以下技术方案予以实现:一种智能搬运机器人,包括底盘,所述底盘底部设有行走轮,所述底盘上转动安装有转柱,所述底座上设有用于控制转柱转动的旋转组件,所述转柱侧壁滑动安装有调节架,所述调节架内设有第一滑槽,所述第一滑槽内转动安装有对拉丝杆,所述对拉丝杆上旋接有与所述第一滑槽滑动连接的第一滑块,所述调节架外壁设有与所述对拉丝杆一端连接的第一电机,所述第一滑块外壁设有滑座,所述滑座侧壁转动安装有转轴,所述转轴一端固定安装有翻转夹具,所述翻转夹具一侧为平面夹持面,另一侧开设有凹槽,所述凹槽内滑动安装有调节板,所述调节板侧壁铰接有一对夹板部件,一对所述夹板部件远离调节板的一端与所述凹槽内壁铰接,一对所述夹板部件之间形成v型夹持面,所述翻转夹具上设有用于控制调节板滑动的调节组件,所述转柱内设有升降组件,所述调节架上设有与所述转轴连接的切换组件;
3、所述夹板部件包括插板以及套板,所述套板内设有滑腔,所述插板一端滑动插入所述滑腔内,所述插板一端与所述调节板铰接,所述套板一端与所述凹槽内壁铰接。
4、优选的,所述切换组件包括设于所述调节架上壁的电推杆,所述电推杆伸缩端固定安装有横架,所述横架下壁设有导向槽,所述导向槽内滑动设有一对移动块,所述移动块下壁固定安装有齿条,所述转轴上安装有与所述齿条啮合的传动齿轮,所述滑座侧壁设有导轨,所述齿条侧壁设有与所述导轨滑动连接的导向块。
5、优选的,所述调节组件包括设于所述翻转夹具侧壁的一对支座,一对所述支座之间转动安装有第一螺杆,所述凹槽一侧内壁设有导向轨,另一侧设有第二滑槽,所述第二滑槽内滑动安装有与所述第一螺杆旋接的第二滑块,所述调节板一端与所述导向轨滑动连接,另一端与所述第二滑块固定连接。
6、优选的,所述升降组件包括设于所述转柱内的安装腔,所述安装腔内转动安装有第二螺杆,所述转柱顶部设有与所述第二螺杆一端连接的第二电机,所述转柱侧壁设有第三滑槽,所述第三滑槽内滑动设有第三滑块,所述第三滑块一端与所述第二螺杆旋接,另一端与所述调节架固定连接。
7、优选的,所述旋转组件包括设于所述底盘上壁的第三电机,所述第三电机驱动端安装有驱动齿轮,所述转柱侧壁设有与所述驱动齿轮啮合的齿圈。
8、优选的,所述底盘上设有防护罩,所述转柱贯穿防护罩上壁且与防护罩上壁通过轴承连接。
9、优选的,所述横架与所述调节架之间安装有伸缩杆。
10、优选的,所述第一螺杆一端安装有旋钮。
11、有益效果
12、本发明提供了一种智能搬运机器人,具备以下有益效果:
13、高度可调节性和灵活性:切换组件的设置可使转轴带动翻转夹具进行旋转,进而根据载物类型选择适宜的夹持面,通过第一滑槽内的对拉丝杆和第一滑块的设计,以及调节板与夹板部件的v型夹持面,机器人能够进一步适应不同尺寸的载物,确保稳固抓取,调节板的滑动调节组件进一步增强了对负载物精细调整的能力,适合多种搬运需求。
14、精准定位与操控性:旋转组件由第三电机驱动,配合齿圈,可以实现转柱的精确旋转控制,提高了机器人在复杂环境中的操作能力,使得机器人能够灵活地在狭小空间中移动和转向,执行精细化作业。
15、自动升降功能:升降组件使得机器人可以根据需要调整工作高度,这对于仓库货架的上下层物品搬运尤为有利,扩大了机器人的适用范围。
16、综上所述,这款智能搬运机器人凭借其多功能设计和高度灵活性,能够在自动化仓储、制造业、物流等领域显著提升搬运效率,减少人力成本,同时保证作业的准确性和安全性。
技术特征:
1.一种智能搬运机器人,其特征在于,包括底盘(1),所述底盘(1)底部设有行走轮(2),所述底盘(1)上转动安装有转柱(3),所述底座上设有用于控制转柱(3)转动的旋转组件,所述转柱(3)侧壁滑动安装有调节架(4),所述调节架(4)内设有第一滑槽(5),所述第一滑槽(5)内转动安装有对拉丝杆(6),所述对拉丝杆(6)上旋接有与所述第一滑槽(5)滑动连接的第一滑块(7),所述调节架(4)外壁设有与所述对拉丝杆(6)一端连接的第一电机(8),所述第一滑块(7)外壁设有滑座(9),所述滑座(9)侧壁转动安装有转轴(10),所述转轴(10)一端固定安装有翻转夹具(11),所述翻转夹具(11)一侧为平面夹持面,另一侧开设有凹槽,所述凹槽内滑动安装有调节板(12),所述调节板(12)侧壁铰接有一对夹板部件,一对所述夹板部件远离调节板(12)的一端与所述凹槽内壁铰接,一对所述夹板部件之间形成v型夹持面,所述翻转夹具(11)上设有用于控制调节板(12)滑动的调节组件,所述转柱(3)内设有升降组件,所述调节架(4)上设有与所述转轴(10)连接的切换组件;
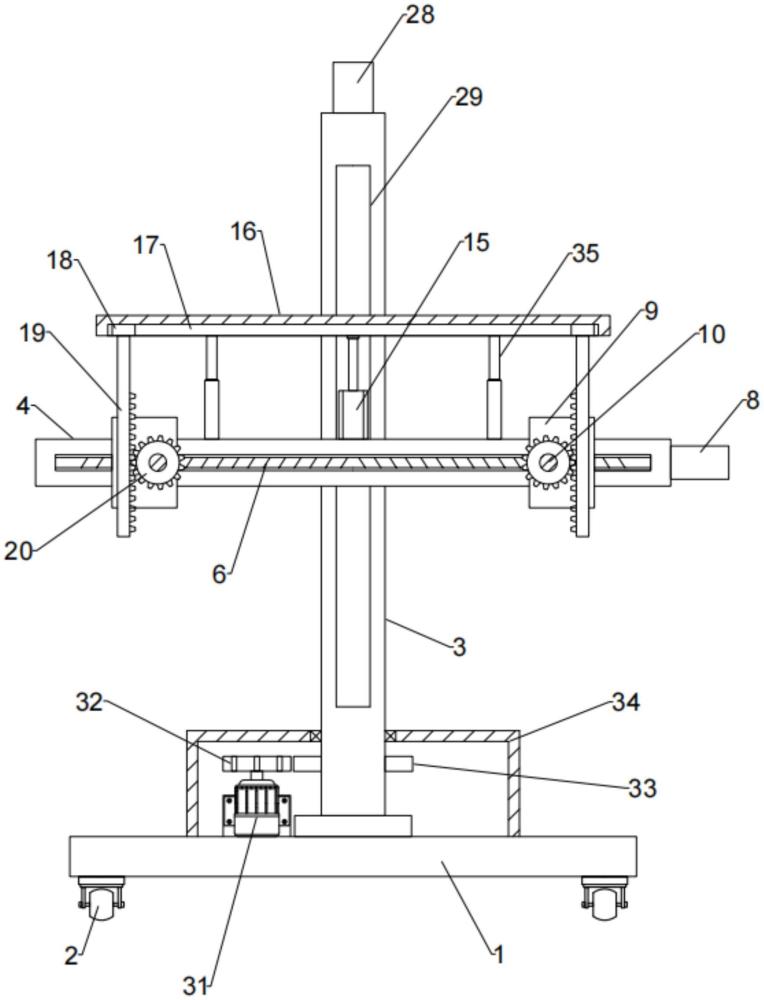
2.根据权利要求1所述的一种智能搬运机器人,其特征在于,所述切换组件包括设于所述调节架(4)上壁的电推杆(15),所述电推杆(15)伸缩端固定安装有横架(16),所述横架(16)下壁设有导向槽(17),所述导向槽(17)内滑动设有一对移动块(18),所述移动块(18)下壁固定安装有齿条(19),所述转轴(10)上安装有与所述齿条(19)啮合的传动齿轮(20),所述滑座(9)侧壁设有导轨(21),所述齿条(19)侧壁设有与所述导轨(21)滑动连接的导向块(22)。
3.根据权利要求2所述的一种智能搬运机器人,其特征在于,所述调节组件包括设于所述翻转夹具(11)侧壁的一对支座,一对所述支座之间转动安装有第一螺杆(23),所述凹槽一侧内壁设有导向轨(24),另一侧设有第二滑槽(25),所述第二滑槽(25)内滑动安装有与所述第一螺杆(23)旋接的第二滑块(26),所述调节板(12)一端与所述导向轨(24)滑动连接,另一端与所述第二滑块(26)固定连接。
4.根据权利要求3所述的一种智能搬运机器人,其特征在于,所述升降组件包括设于所述转柱(3)内的安装腔,所述安装腔内转动安装有第二螺杆(27),所述转柱(3)顶部设有与所述第二螺杆(27)一端连接的第二电机(28),所述转柱(3)侧壁设有第三滑槽(29),所述第三滑槽(29)内滑动设有第三滑块(30),所述第三滑块(30)一端与所述第二螺杆(27)旋接,另一端与所述调节架(4)固定连接。
5.根据权利要求4所述的一种智能搬运机器人,其特征在于,所述旋转组件包括设于所述底盘(1)上壁的第三电机(31),所述第三电机(31)驱动端安装有驱动齿轮(32),所述转柱(3)侧壁设有与所述驱动齿轮(32)啮合的齿圈(33)。
6.根据权利要求5所述的一种智能搬运机器人,其特征在于,所述底盘(1)上设有防护罩(34),所述转柱(3)贯穿防护罩(34)上壁且与防护罩(34)上壁通过轴承连接。
7.根据权利要求2所述的一种智能搬运机器人,其特征在于,所述横架(16)与所述调节架(4)之间安装有伸缩杆(35)。
8.根据权利要求3所述的一种智能搬运机器人,其特征在于,所述第一螺杆(23)一端安装有旋钮。
技术总结
本发明公开了一种智能搬运机器人,包括底盘,所述底盘底部设有行走轮,所述底盘上转动安装有转柱,所述底座上设有用于控制转柱转动的旋转组件,所述转柱侧壁滑动安装有调节架,所述调节架内设有第一滑槽,所述第一滑槽内转动安装有对拉丝杆,所述对拉丝杆上旋接有与所述第一滑槽滑动连接的第一滑块,本发明涉及搬运机器人技术领域,切换组件的设置可使转轴带动翻转夹具进行旋转,进而根据载物类型选择适宜的夹持面,通过第一滑槽内的对拉丝杆和第一滑块的设计,以及调节板与夹板部件的V型夹持面,机器人能够进一步适应不同尺寸的载物,确保稳固抓取,调节板的滑动调节组件进一步增强了对负载物精细调整的能力,适合多种搬运需求。
技术研发人员:胡昊天,马晓峰,吕学庚,候明辉
受保护的技术使用者:安盛机器人技术(盘锦)有限公司
技术研发日:
技术公布日:2024/11/14
技术研发人员:胡昊天,马晓峰,吕学庚,候明辉
技术所有人:安盛机器人技术(盘锦)有限公司
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除