协作机器人双通道碰撞预测方法、装置和计算机设备与流程
本申请涉及机器人,特别是涉及一种协作机器人双通道碰撞预测方法、装置、计算机设备、计算机可读存储介质和计算机程序产品。
背景技术:
1、随着机器人研发技术的发展,出现了协作机器人双通道碰撞预测技术,可以对机器人和所处环境中出现的可能产生碰撞的对象进行碰撞预测,进而采取急停操作对碰撞进行规避。
2、传统的协作机器人双通道碰撞预测方法中,一般是通过上位机软件对碰撞过程进行预测,进而下发指令,但是上位机软件进行预测指令下发的过程,都是通过人工编写整套代码进行执行的,一旦技术人员设计的代码出现了编程错误,碰撞预测过程便无法进行,存在较大的风险。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够减小风险的协作机器人双通道碰撞预测方法、装置、计算机设备、计算机可读存储介质和计算机程序产品。
2、第一方面,本申请提供了一种协作机器人双通道碰撞预测方法,包括:
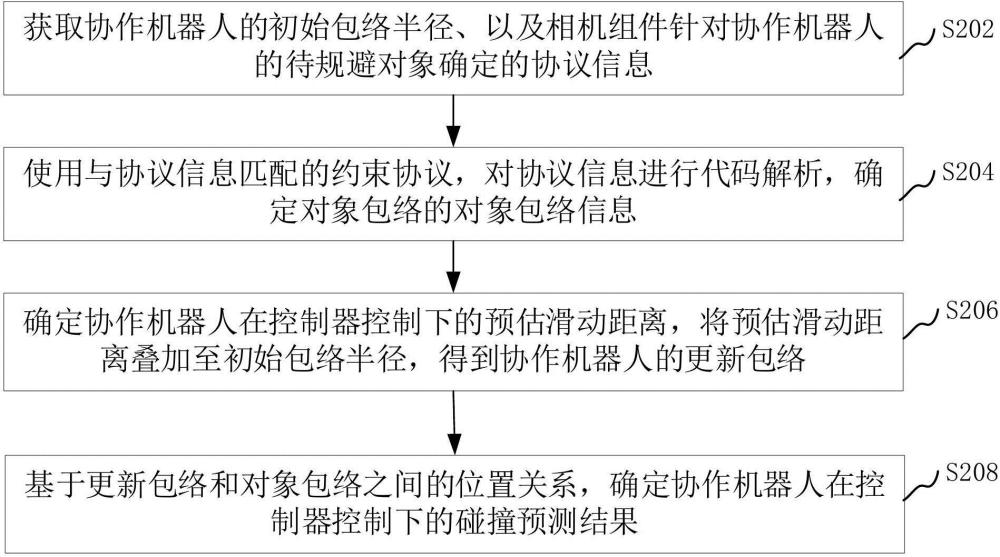
3、获取协作机器人的初始包络半径、以及相机组件针对所述协作机器人的待规避对象确定的协议信息;所述协议信息用于表征所述待规避对象的对象包络;
4、使用与所述协议信息匹配的约束协议,对所述协议信息进行代码解析,确定所述对象包络的对象包络信息;
5、确定所述协作机器人在控制器控制下的预估滑动距离,将所述预估滑动距离叠加至所述初始包络半径,得到所述协作机器人的更新包络;
6、基于所述更新包络和所述对象包络之间的位置关系,确定所述协作机器人在所述控制器控制下的碰撞预测结果。
7、在其中一个实施例中,使用与所述协议信息匹配的约束协议,对所述协议信息进行代码解析,确定所述对象包络的对象包络信息,包括:
8、获取所述相机组件的相机标识信息;
9、在协议数据库中查找与所述相机标识信息对应的协议,作为与所述协议信息匹配的约束协议;
10、使用所述约束协议对所述协议信息进行代码解析,确定所述对象包络的对象包络信息。
11、在其中一个实施例中,使用所述约束协议对所述协议信息进行代码解析,确定所述对象包络的对象包络信息,包括:
12、获取所述约束协议对应的数据格式;
13、基于所述数据格式对所述协议信息进行代码解析,确定所述对象包络的对象包络信息。
14、在其中一个实施例中,确定所述协作机器人在控制器控制下的预估滑动距离,将所述预估滑动距离叠加至所述初始包络半径,得到所述协作机器人的更新包络,包括:
15、获取所述协作机器人的最大减速速度和当前运动速度;
16、基于所述最大减速速度和所述当前运动速度,确定所述协作机器人的预估滑动距离;
17、将所述预估滑动距离叠加至所述初始包络半径,得到所述协作机器人的更新包络。
18、在其中一个实施例中,基于所述更新包络和所述对象包络之间的位置关系,确定所述协作机器人在所述控制器控制下的碰撞预测结果,包括:
19、对所述更新包络中每一点的坐标与所述对象包络中每一点的坐标分别求差,得到所述更新包络和所述对象包络的坐标差集;
20、在坐标原点位于所述坐标差集所表征的几何凸包中的情况下,确定所述协作机器人在所述控制器控制下与所述待规避对象会产生碰撞。
21、第二方面,本申请还提供了一种协作机器人双通道碰撞预测系统,其特征在于,所述系统包括:相机组件、以及与所述相机组件连接的安全模块;
22、所述相机组件用于针对所述协作机器人的待规避对象确定的协议信息;所述协议信息用于表征所述待规避对象的对象包络;
23、所述安全模块用于实现上述实施例所述的方法。
24、第三方面,本申请还提供了一种协作机器人双通道碰撞预测装置,包括:
25、协议信息获取模块,用于获取协作机器人的初始包络半径、以及相机组件针对所述协作机器人的待规避对象确定的协议信息;所述协议信息用于表征所述待规避对象的对象包络;
26、代码解析模块,用于使用与所述协议信息匹配的约束协议,对所述协议信息进行代码解析,确定所述对象包络的对象包络信息;
27、更新包络确定模块,用于确定所述协作机器人在控制器控制下的预估滑动距离,将所述预估滑动距离叠加至所述初始包络半径,得到所述协作机器人的更新包络;
28、碰撞预测结果确定模块,用于基于所述更新包络和所述对象包络之间的位置关系,确定所述协作机器人在所述控制器控制下的碰撞预测结果。
29、第四方面,本申请还提供了一种计算机设备。所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现如上所述的方法的步骤。
30、第五方面,本申请还提供了一种计算机可读存储介质。所述计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上所述的方法的步骤。
31、第六方面,本申请还提供了一种计算机程序产品。所述计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现如上所述的方法的步骤。
32、上述协作机器人双通道碰撞预测方法、装置、计算机设备、计算机可读存储介质和计算机程序产品,获取协作机器人的初始包络半径、以及相机组件针对协作机器人的待规避对象确定的协议信息,可以确定协作机器人以及待规避对象的具体情况,其中,协议信息用于表征待规避对象的对象包络,使用与协议信息匹配的约束协议,对协议信息进行代码解析,确定对象包络的对象包络信息,确定协作机器人在控制器控制下的预估滑动距离,将预估滑动距离叠加至初始包络半径,得到协作机器人的更新包络,可以根据控制器控制下的协作机器人的减速过程对协作机器人的初始包络进行更新,基于更新包络和对象包络之间的位置关系,确定协作机器人在控制器控制下的碰撞预测结果,可以确定在控制器控制下协作机器人在减速到静止时,是否会与待规避对象碰撞。采用上述方法对协作机器人的碰撞情况进行预测,可以实现控制器控制运动、安全模块对运动过程进行碰撞预测的双通道碰撞预测,在保证pld安全等级基础上,拓展了集成商对安全模块所在的安全板的开发能力,并且,只要获取到相机组件确定的协议信息,即可进行碰撞预测,即使相机组件存在异常,也不会影响碰撞预测的过程,从而减小碰撞预测过程的风险。
技术特征:
1.一种协作机器人双通道碰撞预测方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述使用与所述协议信息匹配的约束协议,对所述协议信息进行代码解析,确定所述对象包络的对象包络信息,包括:
3.根据权利要求2所述的方法,其特征在于,所述使用所述约束协议对所述协议信息进行代码解析,确定所述对象包络的对象包络信息,包括:
4.根据权利要求1所述的方法,其特征在于,所述确定所述协作机器人在控制器控制下的预估滑动距离,将所述预估滑动距离叠加至所述初始包络半径,得到所述协作机器人的更新包络,包括:
5.根据权利要求1所述的方法,其特征在于,所述基于所述更新包络和所述对象包络之间的位置关系,确定所述协作机器人在所述控制器控制下的碰撞预测结果,包括:
6.一种协作机器人双通道碰撞预测系统,其特征在于,所述系统包括:相机组件、以及与所述相机组件连接的安全模块;
7.一种协作机器人双通道碰撞预测装置,其特征在于,所述装置包括:
8.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至6中任一项所述的方法的步骤。
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至6中任一项所述的方法的步骤。
10.一种计算机程序产品,包括计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至6中任一项所述的方法的步骤。
技术总结
本申请涉及一种协作机器人双通道碰撞预测方法、装置、计算机设备、计算机可读存储介质和计算机程序产品。所述方法包括:获取协作机器人的初始包络半径、以及相机组件针对协作机器人的待规避对象确定的协议信息;协议信息用于表征待规避对象的对象包络;使用与协议信息匹配的约束协议,对协议信息进行代码解析,确定对象包络的对象包络信息;确定协作机器人在控制器控制下的预估滑动距离,将预估滑动距离叠加至初始包络半径,得到协作机器人的更新包络;基于更新包络和对象包络之间的位置关系,确定协作机器人在控制器控制下的碰撞预测结果。采用本方法能够在保证达到PLd安全等级的情况下,减少碰撞预测风险。
技术研发人员:黄彦玮,张鹏,张国平,王光能
受保护的技术使用者:深圳市大族机器人有限公司
技术研发日:
技术公布日:2024/11/14
技术研发人员:黄彦玮,张鹏,张国平,王光能
技术所有人:深圳市大族机器人有限公司
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除