杆塔防坠导轨的卡阻纠偏结构、机器人及卡阻纠偏方法与流程
本发明属于电力防坠导轨巡检领域,尤其涉及一种杆塔防坠导轨的卡阻纠偏结构、机器人及卡阻纠偏方法。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
2、杆塔防坠导轨的状态影响登塔作业人员的人身安全。通常,定期对自锁器卡滞、导轨表面锈蚀或形变、接头错位间隙、固定点和连接处紧固件松动等潜在缺陷进行检测,以保证杆塔防坠导轨的状态可靠。目前防坠导轨检测多是通过人工登塔、地面人员采用望远镜观察或者无人机完成。人工登塔工作强度大,风险高;望远镜和无人机无法进行接触检测,手段单一、易漏检且准确性难以保证。采用防坠导轨检测机器人替代或辅助人工检测,可有效降低检测劳动强度和作业风险,提高导轨状态检测效率和准确性。
3、但在机器人实际运行中存在如下问题:
4、(1)防坠导轨的换向器转换导轨的方向时,若换向导轨转向不到位,可能会导致换向导轨与运行导轨衔接有角度偏差,使得机器人无法换向。
5、(2)防坠导轨接口处衔接不连贯,接口可能出现宽缝及偏轨台阶情况,而宽缝和偏轨台阶一般出现在导轨的下表面及两侧面,这样会造成机器人导向轮和抱紧轮卡滞的问题。
技术实现思路
1、为了解决上述背景技术中存在的技术问题,本发明提供一种杆塔防坠导轨的卡阻纠偏结构、机器人及卡阻纠偏方法,其能对导轨卡阻进行纠偏,顺利通过接缝处的宽缝及台阶等障碍。
2、为了实现上述目的,本发明采用如下技术方案:
3、本发明的第一个方面提供一种杆塔防坠导轨的卡阻纠偏结构。
4、一种杆塔防坠导轨的卡阻纠偏结构,其包括:驱动轮、抱紧轮、浮动组件和导向轮组件;
5、所述驱动轮与浮动组件相连,所述驱动轮的下方与导轨上表面贴合;所述浮动组件的上端与固定支架相连;
6、所述导向轮组件包括支撑板、导向轮座、压缩弹簧和导向轮;所述支撑板连接在固定支架上,所述导向轮座安装在支撑板上,所述导向轮通过导向轮轴固定到导向轮座上,所述压缩弹簧安装在支撑板与导向轮座之间;
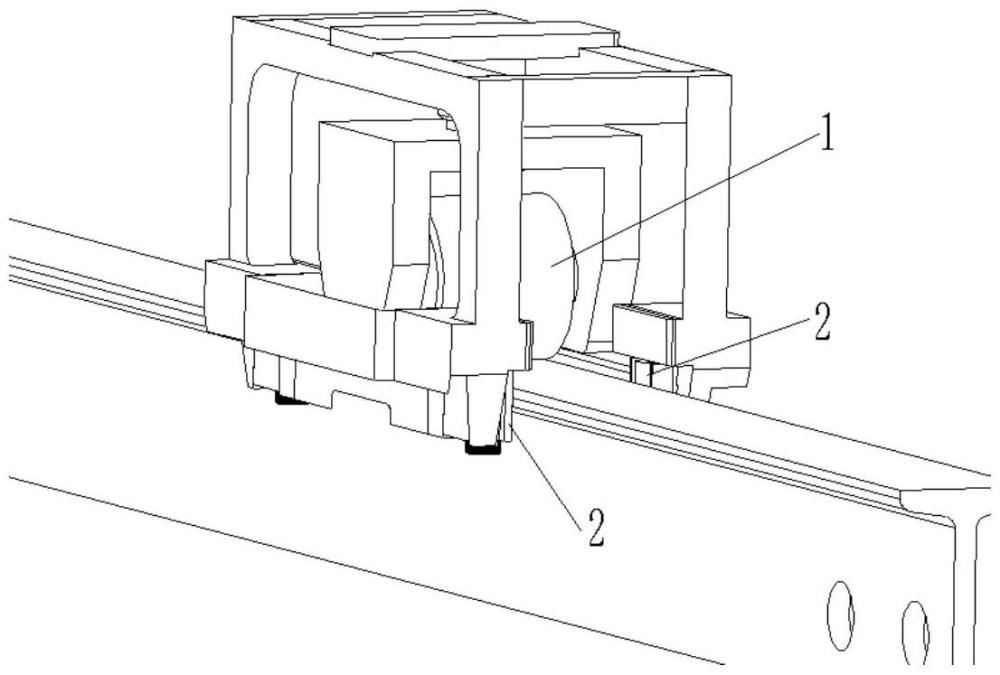
7、所述导向轮组件安装在固定支架两侧,用于抱紧导轨侧边且进行运动导向;所述抱紧轮安装在支撑板上,且与导轨下表面的两侧贴合,配合驱动轮共同夹紧导轨;沿着导轨方向,所述导向轮座及支撑板上均设置有缓冲斜面,以纠正导轨的偏角。
8、作为一种实施方式,所述缓冲斜面为滑雪板面结构。
9、作为一种实施方式,所述浮动组件包括浮动支架及弹簧;所述弹簧的一端与浮动支架固定连接,另一端连接在固定支架上。
10、作为一种实施方式,所述弹簧的压缩量可调。
11、作为一种实施方式,所述浮动支架设置在固定支架内侧,且可随着弹簧伸缩而上下移动。
12、作为一种实施方式,所述支撑板上设有滑槽,所述导向轮座上设有与所述滑槽相匹配的滑块,所述滑块设置在滑槽内。
13、作为一种实施方式,所述滑槽为t型滑槽,所述滑块为t型滑块。
14、作为一种实施方式,压板通过螺钉将导向轮座固定到支撑板上。
15、本发明的第二个方面提供一种杆塔防坠导轨验收机器人。
16、一种杆塔防坠导轨验收机器人,其包括:
17、驱动机构及
18、如上述所述的防坠杆塔的卡阻纠偏结构;
19、所述驱动机构用于为驱动轮提供动力。
20、本发明的第三个方面提供一种杆塔防坠导轨的卡阻纠偏结构的卡阻纠偏方法。
21、一种杆塔防坠导轨的卡阻纠偏结构的卡阻纠偏方法,其包括:
22、驱动轮在浮动组件的正向向下的压力作用下,贴合在导轨上表面,并与导轨下表面两侧的抱紧轮共同作用,以夹紧导轨;同时,导向轮组件抱紧导轨侧边且进行运动导向;
23、当机器人运行到防坠导轨的接口处时,利用导向轮座及支撑板上的缓冲斜面,对导轨的偏角进行纠正,以顺利通过导轨下表面的宽缝和接缝台阶。
24、本发明的有益效果是:
25、本发明创新性地提出了一种杆塔防坠导轨的卡阻纠偏结构,其利用浮动组件连接驱动轮以及具有压缩弹簧的导向轮组件,再结合导向轮座及支撑板上设置的缓冲斜面,以纠正导轨的偏角,解决了换向导轨转向不到位,可能会导致换向导轨与运行导轨衔接有角度偏差,使得机器人无法换向及造成机器人导向轮和抱紧轮卡滞的问题,实现了对导轨卡阻进行纠偏,顺利通过接缝处的宽缝及台阶等障碍。
26、本发明附加方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种杆塔防坠导轨的卡阻纠偏结构,其特征在于,包括:驱动轮、抱紧轮、浮动组件和导向轮组件;
2.如权利要求1所述的杆塔防坠导轨的卡阻纠偏结构,其特征在于,所述缓冲斜面为滑雪板面结构。
3.如权利要求1所述的杆塔防坠导轨的卡阻纠偏结构,其特征在于,所述浮动组件包括浮动支架及弹簧;所述弹簧的一端与浮动支架固定连接,另一端连接在固定支架上。
4.如权利要求3所述的杆塔防坠导轨的卡阻纠偏结构,其特征在于,所述弹簧的压缩量可调。
5.如权利要求3所述的杆塔防坠导轨的卡阻纠偏结构,其特征在于,所述浮动支架设置在固定支架内侧,且可随着弹簧伸缩而上下移动。
6.如权利要求1所述的杆塔防坠导轨的卡阻纠偏结构,其特征在于,所述支撑板上设有滑槽,所述导向轮座上设有与所述滑槽相匹配的滑块,所述滑块设置在滑槽内。
7.如权利要求6所述的杆塔防坠导轨的卡阻纠偏结构,其特征在于,所述滑槽为t型滑槽,所述滑块为t型滑块。
8.如权利要求1所述的杆塔防坠导轨的卡阻纠偏结构,其特征在于,压板通过螺钉将导向轮座固定到支撑板上。
9.一种杆塔防坠导轨验收机器人,其特征在于,包括:
10.一种如权利要求1-8中任一项所述的杆塔防坠导轨的卡阻纠偏结构的卡阻纠偏方法,其特征在于,包括:
技术总结
本发明属于电力防坠导轨巡检领域,提供了一种杆塔防坠导轨的卡阻纠偏结构、机器人及卡阻纠偏方法。其中,杆塔防坠导轨的卡阻纠偏结构包括驱动轮、抱紧轮、浮动组件和导向轮组件;驱动轮与浮动组件相连,驱动轮的下方与导轨上表面贴合;浮动组件的上端与固定支架相连;导向轮组件包括支撑板、导向轮座、压缩弹簧和导向轮;支撑板连接在固定支架上,所述导向轮座安装在支撑板上,导向轮通过导向轮轴固定到导向轮座上,压缩弹簧安装在支撑板与导向轮座之间;导向轮组件安装在固定支架两侧,用于抱紧导轨侧边且进行运动导向;抱紧轮安装在支撑板上,且与导轨下表面的两侧贴合,配合驱动轮共同夹紧导轨;沿着导轨方向,导向轮座及支撑板上均设置有缓冲斜面,以纠正导轨的偏角。
技术研发人员:苑锋,王斌,李岩,张永生,蒋克强,蔺茹,孟海磊,孙兆键,孙晓斌,李开广,李珊,陈星延,李中凯
受保护的技术使用者:国网智能科技股份有限公司
技术研发日:
技术公布日:2024/11/14
技术研发人员:苑锋,王斌,李岩,张永生,蒋克强,蔺茹,孟海磊,孙兆键,孙晓斌,李开广,李珊,陈星延,李中凯
技术所有人:国网智能科技股份有限公司
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除