一种适于机器人用的雕肛刀的制作方法
本技术涉及一种适于机器人用的雕肛刀,属于屠宰和肉类产品。
背景技术:
1、目前,在生猪屠宰行业,有一个工序叫雕肛,由人工手持雕肛刀把白条猪肛门和大肠头从酮体分割下来。随着自动化和智能化技术设备在屠宰行业的应用,雕肛工序也向机器人代替人工操作的大趋势发展。传统人工操作的雕肛刀集成了水、压缩空气、真空等开关阀并设计成适于手持的形状,结构复杂无法安装在机器人上,因此亟需研究一种适于机器人用的雕肛刀。
技术实现思路
1、本实用新型目的是提供一种适于机器人用的雕肛刀,为机器人代替人工操作提供方便,降低了制造、维修成本,提高了工作效率,节省了人力,解决了背景技术中存在的问题。
2、本实用新型的技术方案是:
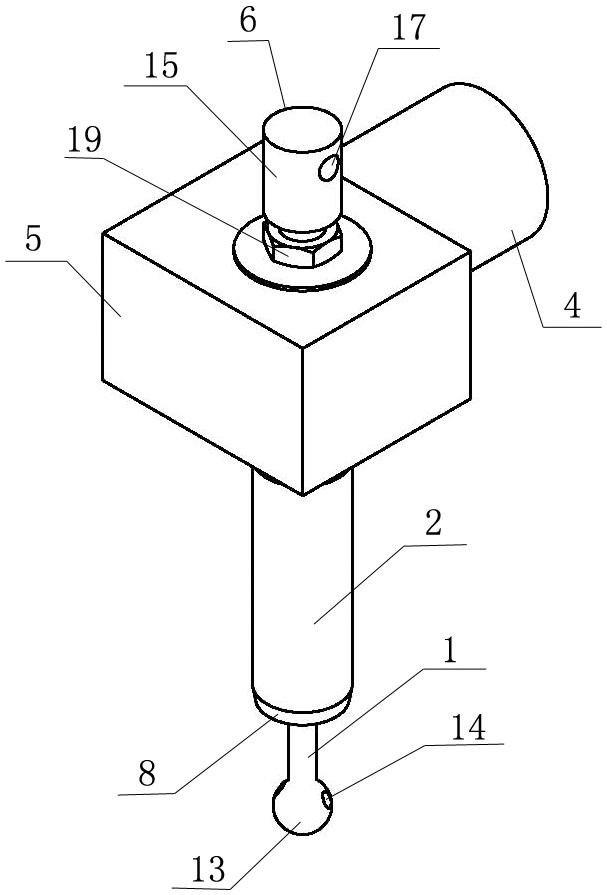
3、一种适于机器人用的雕肛刀,包含导引杆、刀具、气马达、rv减速器、旋转接头和连接轴,气马达设置在rv减速器上,rv减速器设置在机器人治具上;连接轴转动设置在rv减速器的输出端,且两端伸出rv减速器外侧,连接轴上端与旋转接头连接,下端与导引杆连接;旋转接头、连接轴和导引杆内部分别设有孔一、孔二和孔三,孔一、孔二和孔三相连通形成通道;导引杆上设有刀具。
4、所述刀具为圆筒状结构,刀具套设在导引杆上,通过连接轴和导引杆进行固定,刀具底部设有刀刃。
5、所述刀具内侧的导引杆上端设有喷水孔,导引杆底部伸出刀具外侧设有球形结构,球形结构上设有排污孔。
6、所述rv减速器下方的连接轴上设有挡油盘,防止rv减速器漏油污染白条猪。
7、所述连接轴两端均设有内螺纹,旋转接头下端与导引杆上端均设有外螺纹,内螺纹与外螺纹相匹配,连接轴两端分别与旋转接头下端和导引杆上端螺纹连接。
8、所述旋转接头通过管道与真空泵和水管连接,管道上设有两个电磁阀,通过两个电磁阀控制水或空气进入通道内部,从而起到冲洗刀具和抽吸大肠内污物的作用。
9、所述旋转接头包含外壳和旋转件,外壳内部设有旋转件,旋转件下端与连接轴螺纹连接。
10、所述外壳上设有连接孔,旋转件设有中心孔,连接孔和中心孔相连通组成l型的孔一;旋转接头通过连接孔与管道连接。
11、所述连接轴上端设有螺母,通过螺母锁紧连接轴和rv减速器。
12、所述气马达和rv减速器等均为本领域公知公用的设备。
13、本实用新型的有益效果是:为机器人代替人工操作提供方便,降低了制造、维修成本,提高了工作效率,节省了人力。
技术特征:
1.一种适于机器人用的雕肛刀,其特征在于:包含导引杆(1)、刀具(2)、气马达(4)、rv减速器(5)、旋转接头(6)和连接轴(7),气马达(4)设置在rv减速器(5)上,rv减速器(5)设置在机器人治具上;连接轴(7)转动设置在rv减速器(5)的输出端,且两端伸出rv减速器(5)外侧,连接轴(7)上端与旋转接头(6)连接,下端与导引杆(1)连接;旋转接头(6)、连接轴(7)和导引杆(1)内部分别设有孔一(9)、孔二(10)和孔三(11),孔一(9)、孔二(10)和孔三(11)相连通形成通道;导引杆(1)上设有刀具(2)。
2.根据权利要求1所述的一种适于机器人用的雕肛刀,其特征在于:所述刀具(2)为圆筒状结构,刀具(2)套设在导引杆(1)上,通过连接轴(7)和导引杆(1)进行固定,刀具(2)底部设有刀刃(8)。
3.根据权利要求2所述的一种适于机器人用的雕肛刀,其特征在于:所述刀具(2)内侧的导引杆(1)上端设有喷水孔(12),导引杆(1)底部伸出刀具外侧设有球形结构(13),球形结构上设有排污孔(14)。
4.根据权利要求1或2所述的一种适于机器人用的雕肛刀,其特征在于:所述rv减速器(5)下方的连接轴(7)上设有挡油盘(3)。
5.根据权利要求3所述的一种适于机器人用的雕肛刀,其特征在于:所述连接轴(7)两端均设有内螺纹,旋转接头(6)下端与导引杆(1)上端均设有外螺纹,内螺纹与外螺纹相匹配,连接轴(7)两端分别与旋转接头(6)下端和导引杆(1)上端螺纹连接。
6.根据权利要求5所述的一种适于机器人用的雕肛刀,其特征在于:所述旋转接头(6)通过管道与真空泵和水管连接,管道上设有两个电磁阀,通过两个电磁阀控制水或空气进入通道内部。
7.根据权利要求6所述的一种适于机器人用的雕肛刀,其特征在于:所述旋转接头(6)包含外壳(15)和旋转件(16),外壳内部设有旋转件,旋转件下端与连接轴(7)螺纹连接。
8.根据权利要求7所述的一种适于机器人用的雕肛刀,其特征在于:所述外壳(15)上设有连接孔(17),旋转件(16)设有中心孔(18),连接孔和中心孔相连通组成l型的孔一;旋转接头(6)通过连接孔与管道连接。
9.根据权利要求1或2所述的一种适于机器人用的雕肛刀,其特征在于:所述连接轴(7)上端设有螺母(19),通过螺母锁紧连接轴(7)和rv减速器(5)。
技术总结
本技术涉及一种适于机器人用的雕肛刀,属于屠宰和肉类产品技术领域。技术方案是:气马达(4)设置在RV减速器(5)上,RV减速器(5)设置在机器人治具上;连接轴(7)转动设置在RV减速器(5)的输出端,且两端伸出RV减速器(5)外侧,连接轴(7)上端与旋转接头(6)连接,下端与导引杆(1)连接;旋转接头(6)、连接轴(7)和导引杆(1)内部分别设有孔一(9)、孔二(10)和孔三(11),孔一(9)、孔二(10)和孔三(11)相连通形成通道;导引杆(1)上设有刀具(2)。本技术的有益效果是:为机器人代替人工操作提供方便,降低了制造、维修成本,提高了工作效率,节省了人力。
技术研发人员:安德斌
受保护的技术使用者:安德斌
技术研发日:20240617
技术公布日:2024/12/19
技术研发人员:安德斌
技术所有人:安德斌
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除