单相逆变器双层嵌套自适应滑模控制方法与流程
本发明属于单相逆变器控制领域,具体地说是单相逆变器双层嵌套自适应滑模控制方法。
背景技术:
1、单相逆变器被广泛应用于分布式发电、储能系统和不间断电源等领域。对于包括单相逆变器在内的电力电子系统,需要保证在负载以及系统参数存在不确定的情况下,输出电压能够有效跟踪上给定的参考,这要求所设计的控制器需要具有较强的鲁棒性。
2、滑模控制通过其高增益的特性,能够有效的降低系统对参数失配以及扰动的敏感性。然而由于系统扰动的上界往往是未知的,因此需要较大的控制器增益才能保证系统的稳定性。这将给系统带来明显的抖振现象,降低了系统的控制性能。此外,当系统的扰动发生变化时,传统的滑模控制器增益并不能适应其变化,而始终为一个恒定值。这将导致控制器增益要么设计的过于大,使系统性能存在冗余;要么设计的太小,导致系统失稳。
技术实现思路
1、为解决上述技术问题,本发明提供了单相逆变器双层嵌套自适应滑模控制方法。其无需使用滤波电感以及滤波电容的信息,降低了控制器对参数变化的敏感性。此外,本发明使用双层嵌套的自适应结构,保证了所设计的滑模控制器增益会随着扰动的变化而发生变化,提高了系统的抗干扰能力。与现有的滑模控制器相比,本发明较低的滑模控制器增益降低了因高增益带来的抖振现象,在保证控制器强鲁棒性的同时,优化了系统的性能。
2、为实现上述目的,本发明采取的技术方案是:
3、单相逆变器双层嵌套自适应滑模控制方法,包括以下步骤:
4、s1,基于基尔霍夫定律,建立了单相逆变器系统模型以及输出电压跟踪误差的系统模型;
5、s2,根据控制目标定义了系统的滑模面,在同时考虑参数失配以及负载扰动的情况下,结合步骤s1建立滑模面的动态方程;
6、s3,基于滑模等效控制的概念,建立了滑模控制器增益的跟踪误差模型;
7、s4,基于步骤s3,构建了自适应滑模控制器增益的自适应律,其能够保证所设计的滑模控制器增益会随着扰动的变化而发生变化,降低了因高增益带来的抖振现象。
8、作为本发明进一步改进,所述步骤s1中基于基尔霍夫定律,建立了单相逆变器系统模型以及输出电压跟踪误差的系统模型,具体过程如下:
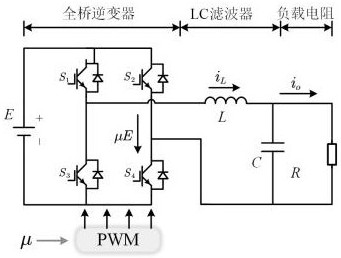
9、根据基尔霍夫定律,单相逆变器的系统模型表示为:
10、
11、其中l,c以及r表示单相逆变器系统中的滤波电感,滤波电容以及负载电阻,vo和il分别表示输出电压和电感电流,e表示直流侧电压,μ表示控制输入;
12、为了便于控制器设计,定义输出电压跟踪误差:
13、e=vr-vo (2)
14、其中vr表示为逆变器的参考电压;
15、将(1)代入(2)可得输出电压跟踪误差的动态方程为:
16、
17、其中表示逆变器的参考电压的一阶导数;
18、而输出电压跟踪误差的二阶导数为:
19、
20、作为本发明进一步改进,所述步骤s2中根据控制目标定义系统的滑模面,在同时考虑参数失配以及负载扰动的情况下,结合s1建立滑模面的动态方程,具体过程如下:
21、由于系统的控制目标是保证输出电压能够有效的跟踪逆变器的参考电压,因此将系统的滑模面选取为:
22、
23、其中λ>0是一个待设计的正常数,σ(t)为该系统的滑模面,当滑模面等于0是,系统输出电压的跟踪误差e也将等于0,表明输出电压已经跟踪上了逆变器的参考电压;
24、将(5)沿着(3)和(4)的轨迹对时间求导可得滑模面的动态方程:
25、
26、当逆变器的滤波电感l,滤波电容c以及负载电阻r存在不确定性时,将(6)重写为:
27、
28、其中d(t)表示系统中的集总扰动,具体表述为:
29、
30、其中ξ1表示负载变化引起的系统扰动,ξ2表示参数失配引起的系统扰动。
31、作为本发明进一步改进,所述步骤s3中基于滑模等效控制的概念,建立了滑模控制器增益的跟踪误差模型,具体过程如下:
32、假设在步骤s2中定义的集总扰动满足:
33、
34、其中a0是集总扰动的上界,是一个未知的常数,而a1表示集总扰动导数的上界,是已知常数;
35、根据滑模面的动态方程(7)将系统的控制器设计为:
36、
37、其中k1>0表示正定的控制器增益,η是一个非常小的正常数,k(t)是自适应滑模控制器增益,sgn(·)表示符号函数;
38、根据滑模等效控制的定义,当滑模面收敛至0时,通过求解代数方程可得:
39、ueq(t)=-d(t) (11)
40、其中ueq(t)表示所设计滑模等效控制律,通过对高频的切换信号-[k(t)+η]sgn(σ)进行低通滤波得到其近似值
41、
42、其中τ>0是一个很小的时间常数,如果τ选取的足够小,则也将会非常小;
43、假设存在常数1>∈1>0和∈0>0使得ueq(t)和满足:
44、
45、不等式(13)是对ueq(t)估计精度的假设,其取决于滤波器的带宽1/τ;
46、在控制过程中,为了始终保证变量在滑模面上滑动,k(t)需要满足:
47、
48、其中0<α<1,∈>0是为了保证控制器裕度而设计的变量。
49、定义自适应滑模控制增益的跟踪误差为:
50、
51、只要保证δ(t)收敛到0,则滑模增益k(t)将能够保证滑模面收敛到0。
52、作为本发明进一步改进,所述步骤s4中构建了自适应滑模控制器增益的自适应律,具体过程如下:
53、通过将自适应滑模控制增益选取为:
54、
55、其中γ>0表示待设计的正定参数,q>1是保证控制器裕度的参数,r0>0是固定的正标量;
56、在所设计的自适应滑模控制器增益(16)下,其能够保证自适应滑模控制增益的跟踪误差δ(t)收敛到0,进而保证所设计的滑模面最终能够收敛到0。有益效果:
57、本发明提供单相逆变器双层嵌套自适应滑模控制算法,其无需使用滤波电感以及滤波电容的信息,降低了控制器对参数变化的敏感性。此外,本发明使用双层嵌套的自适应结构,保证了所设计的滑模控制器增益会随着扰动的变化而发生变化,提高了系统的抗干扰能力。与现有的滑模控制器相比,本发明较低的滑模控制器增益降低了因高增益带来的抖振现象,在保证控制器强鲁棒性的同时,优化了系统的性能。
技术特征:
1.单相逆变器双层嵌套自适应滑模控制方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的单相逆变器双层嵌套自适应滑模控制方法,其特征在于:所述步骤s1中基于基尔霍夫定律,建立了单相逆变器系统模型以及输出电压跟踪误差的系统模型,具体过程如下:
3.根据权利要求1所述的单相逆变器双层嵌套自适应滑模控制方法,其特征在于:所述步骤s2中根据控制目标定义系统的滑模面,在同时考虑参数失配以及负载扰动的情况下,结合s1建立滑模面的动态方程,具体过程如下:
4.根据权利要求1所述的单相逆变器双层嵌套自适应滑模控制方法,其特征在于:所述步骤s3中基于滑模等效控制的概念,建立了滑模控制器增益的跟踪误差模型,具体过程如下:
5.根据权利要求1所述的单相逆变器双层嵌套自适应滑模控制方法,其特征在于:所述步骤s4中构建了自适应滑模控制器增益的自适应律,具体过程如下:
技术总结
单相逆变器双层嵌套自适应滑模控制方法,然而这些参数信息往往是不易获取的。并且在系统运行过程中参数失配将恶化系统的控制性能,增加了系统失稳的风险。为解决该问题,本专利针对单相逆变器公开了一种双层嵌套自适应滑模控制算法。该算法无需使用滤波电感以及滤波电容的信息,降低了控制器对参数变化的敏感性。此外,本发明使用双层嵌套的自适应结构,保证了所设计的滑模控制器增益会随着扰动的变化而发生变化,提高了系统的抗干扰能力。与现有的滑模控制器相比,本发明较低的滑模控制器增益降低了因高增益带来的抖振现象,在保证控制器强鲁棒性的同时,优化了系统的性能。
技术研发人员:韩宇,尹洪涛,庄园,孙尧,姜利,李炅
受保护的技术使用者:江苏徐电建设集团有限公司
技术研发日:
技术公布日:2024/11/18
技术研发人员:韩宇,尹洪涛,庄园,孙尧,姜利,李炅
技术所有人:江苏徐电建设集团有限公司
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除