一种田间激光智能除草间苗机器人的制作方法
本申请涉机器人,特别是涉及一种田间激光智能除草间苗机器人。
背景技术:
1、二氧化碳玻璃管激光器由于制造成本和售价相对低廉,因此在诸如激光打标和服装面料激光裁剪等生产生活领域,受到了广泛地应用。特别是近年来国内外大量的实践证明,二氧化碳激光器所具有的10.6微米的激光波长,更容易被田间杂草和农作物的茎叶吸收,因此用150w大功率二氧化碳激光束,通过机器视觉技术和ai智能算法,精准锁定并照射田间杂草或者需要打顶的农作物禾苗的顶部分生组织或需要间苗的作物根部,精确给予其一定的照射时间和照射强度,就能够瞬间形成醒目的激光烈焰,或将杂草顶部和需要打顶的作物顶部以及需要间苗的作物根部,或焚烧为灰烬,或将禾苗的顶部灼烧枯萎,既能对田间杂草起到显著的毁伤和灭活效果,也能高效的完成农作物间苗或打顶作业,因而采用大功率二氧化碳激光器除草或间苗或打顶,相比人工和其他机械作业具有很高的性价比和工作效率,在新兴的移动机器人激光除草或间苗打顶领域,大功率二氧化碳激光器因此颇受青睐,成为不二之选。
2、但是,现有的激光除草间苗机器人,多采用液压驱动,结构复杂,精度低,可靠性差,维护成本高,续航里程短,为此急需更合适的机器人结构。
技术实现思路
1、本申请的目的在于创新提供一种田间激光智能除草间苗机器人,以解决上述背景技术中提出的问题。
2、为了解决上述技术问题,本申请提供如下技术方案:
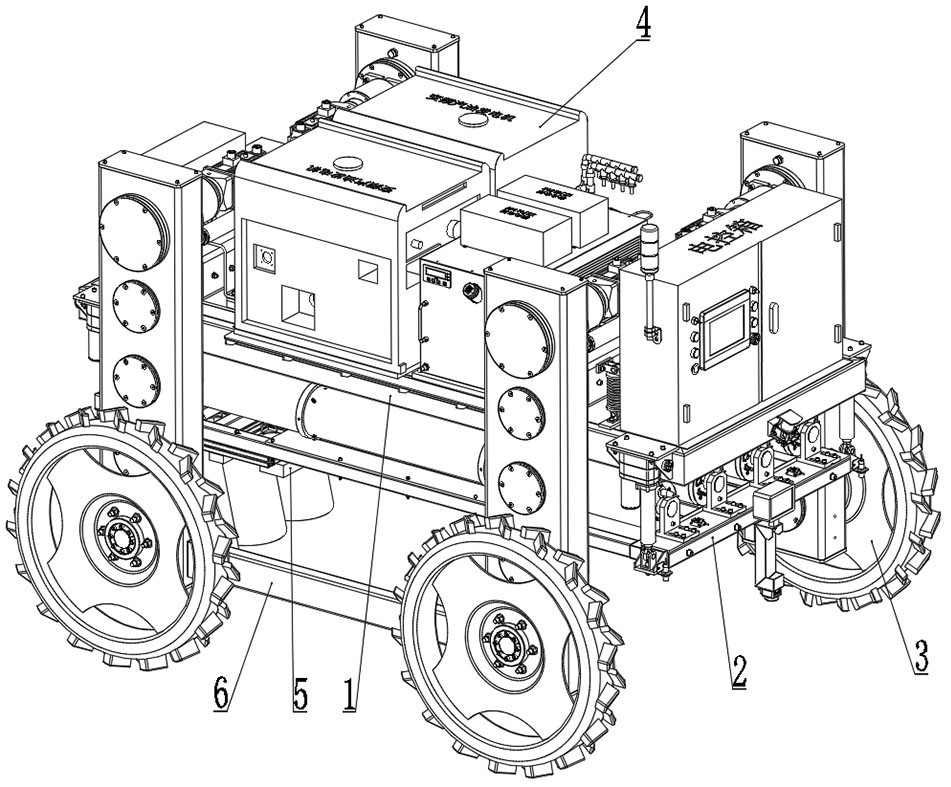
3、一种田间激光智能除草间苗机器人,包括,底座组件、激光打击平台组件、4组驱动轮腿组件、车载设备;
4、所述的车载设备安装于所述的底座组件上面,所述的激光打击平台组件悬挂于所述底座组件的下面,所述的底座组件两边各固定2组驱动轮腿组件;
5、所述的车载设备与所述的激光打击平台组件和所述的驱动轮腿组件分别连接;
6、所述的驱动轮腿组件,包括,驱动轮腿箱体和齿轮组件;
7、所述的驱动轮腿箱体设有与所述的齿轮组件相适配的轴承安装孔;
8、所述的齿轮组件包括:齿轮、齿轮用胀紧套、齿轮轴、带紧定套的双列调心球轴承以及轴承衬套;
9、所述的轴承衬套套设于所述的轴承安装孔内,所述的带紧定套的双列调心球轴承套设于所述的轴承衬套内,所述的齿轮轴贯穿所述的带紧定套的双列调心球轴承内圈;
10、所述的齿轮轴具有定位轴肩,所述的齿轮与所述的齿轮轴之间通过所述的齿轮用胀紧套固定连接,并通过所述的定位轴肩对所述的齿轮和齿轮用胀紧套限位。
11、优选的,所述的激光打击平台组件包括架体组件和安装于架体组件上的若干套激光模组。
12、优选的,所述的架体组件前端设有激光避障雷达。
13、优选的,所述的架体组件四角设有激光测距传感器。
14、优选的,所述的架体组件四角和中心位置设有倾角传感器。
15、优选的,所述的架体组件包括架体,所述架体的上面设有激光模组垫板,所述的激光模组垫板设有导向滑槽,所述导向滑槽的数量与所述激光模组的激光管数量相适配。
16、优选的,所述的架体组件前端设有导向平键。
17、优选的,所述激光打击平台组件的底部设有车底相机和照明组件,所述的车底相机和照明组件包括车底相机和照明框架,所述的车底相机和照明框架设有爆闪灯、前置远端粗预测相机、闪光灯条以及近场精确预测相机。
18、优选的,所述的车载设备包括变频汽油发电机、激光电源、电控箱、冷水机、ups和工控机。
19、与现有技术相比,本申请所达到的有益效果是:一种田间激光智能除草间苗机器人,一方面采用了模块化大功率二氧化碳激光模组,激光模组包含二氧化碳激光管和数字振镜以及伪同轴相机和配套的微型雨刮除尘系统,解决了移动式激光除草间苗机器人所需配套的大功率二氧化碳激光模组存在的安装和维护以及更换难题,具有长期工作定位可靠,激光打击精度保持性好,激光管更换高效便捷,而且激光数字振镜和伪同轴相机镜片带有微型雨刮除尘系统,能够消除尘埃和雾霾对振镜镜头和伪同轴相机镜头的污染和不利影响,有利于激光除草效率的提升。所述激光模组,具有后期容易实现模块化、通用化和标准化的优点,有利于批量生产,节约和减少生产制造成本,适合后期大规模推广使用。另一方面,采用电动伸缩组件调整轮距和激光打击高度,不仅能适应较为平坦的田间的不同作业垄距和垄高的变化,而且还能通过机器人前端装载的三维激光地形扫描雷达,和一整套配套安装在激光打击平台上的多个双轴倾角传感器和激光测距传感器的配合,能够更好的适应在各种坡度的田间作业。
技术特征:
1.一种田间激光智能除草间苗机器人,其特征在于,包括,底座组件、激光打击平台组件、4组驱动轮腿组件、车载设备;
2.根据权利要求1所述的一种田间激光智能除草间苗机器人,其特征在于,所述的激光打击平台组件包括架体组件和安装于架体组件上的若干套激光模组。
3.根据权利要求2所述的一种田间激光智能除草间苗机器人,其特征在于,所述的架体组件前端设有激光避障雷达。
4.根据权利要求2所述的一种田间激光智能除草间苗机器人,其特征在于,所述的架体组件四角设有激光测距传感器。
5.根据权利要求2所述的一种田间激光智能除草间苗机器人,其特征在于,所述的架体组件四角和中心位置设有倾角传感器。
6.根据权利要求2所述的一种田间激光智能除草间苗机器人,其特征在于,所述的架体组件包括架体,所述架体的上面设有激光模组垫板,所述的激光模组垫板设有导向滑槽,所述导向滑槽的数量与所述激光模组的激光管数量相适配。
7.根据权利要求6所述的一种田间激光智能除草间苗机器人,其特征在于,所述的架体组件前端设有导向平键。
8.根据权利要求1所述的一种田间激光智能除草间苗机器人,其特征在于,所述激光打击平台组件的底部设有车底相机和照明组件,所述的车底相机和照明组件包括车底相机和照明框架,所述的车底相机和照明框架设有爆闪灯、前置远端粗预测相机、闪光灯条以及近场精确预测相机。
9.根据权利要求1所述的一种田间激光智能除草间苗机器人,其特征在于,所述的车载设备包括变频汽油发电机、激光电源、电控箱、冷水机、ups和工控机。
技术总结
本申请公开了一种田间激光智能除草间苗机器人,包括4组伺服电机驱动的轮腿组件、前伸缩摇摆桥、后伸缩固定桥、底座组件、可升降的激光打击平台,以及发电机和三维激光地形扫描雷达等电控设备。在激光打击平台的上面和四周,分别安装若干模块化的大功率二氧化碳激光模组,和4组激光测距仪和5组双轴倾角传感器,所述激光模组包含数字振镜和伪同轴相机及微型雨刮除尘系统,而激光打击平台的下面,安装了若干AI智能识别与定位相机和照明装置。因此,本申请的机器人,可通过AI智能相机自动识别和定位杂草与禾苗,并引导激光对其目标精准打击,具有后期容易实现模块化、通用化和标准化的优点,有利于节约成本,适合后期大规模推广使用。
技术研发人员:赵志武,王佺,闵辉,王洪坤,丁睿
受保护的技术使用者:蔚蓝引擎(上海)科技有限公司
技术研发日:
技术公布日:2024/12/10
技术研发人员:赵志武,王佺,闵辉,王洪坤,丁睿
技术所有人:蔚蓝引擎(上海)科技有限公司
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除