一种基于嵌入式的水下被动柔性夹持机构
本技术涉及夹具设备,尤其涉及一种基于嵌入式的水下被动柔性夹持机构。
背景技术:
1、目前更多是使用鱼网等形式进行捕捉,捕捉难度大,尤其是栖底鱼更难捕捉,采用渔网等形式在捕鱼效率低,工作人员劳动强度大。
2、现有的用于捕捉鱼的夹持机构主要是刚性夹爪,刚性夹持器会对活体鱼类造成伤害;也有一些柔性夹持机构,柔性夹持机构多为主动式夹持机构,由上位机控制进行夹取,需要上位机主动触发,但由于活体鱼类会规避,因此对响应速度会有更高的要求。
技术实现思路
1、本实用新型的目的是提供一种基于嵌入式的水下被动柔性夹持机构,解决现有技术中存在的问题。
2、为解决上述技术问题,本实用新型采用如下技术方案:
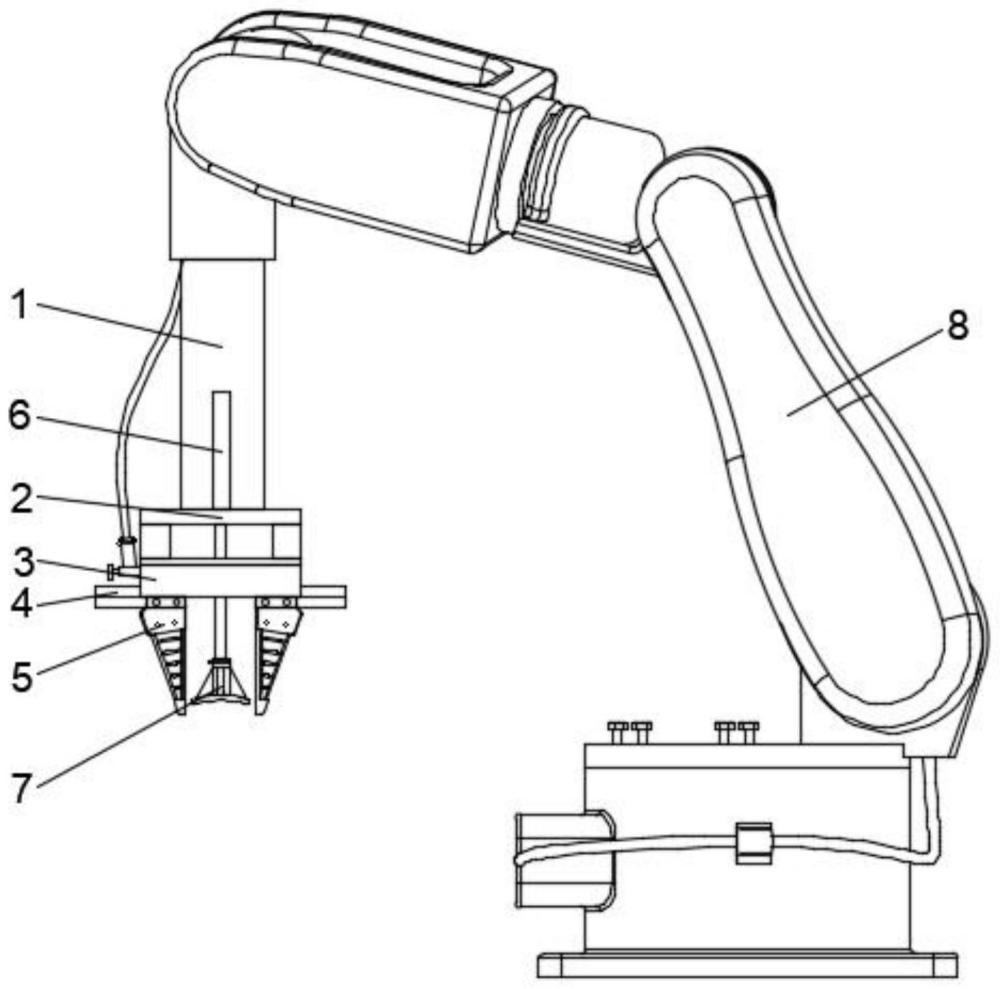
3、本实用新型一种基于嵌入式的水下被动柔性夹持机构,包括支架,所述支架设置在六轴机械臂的工作端,所述支架的底部设置有安装座,所述安装座的底部设置有气动滑轨,所述气动滑轨的左右两侧设置有滑块,所述滑块的底部设置有柔性夹爪,所述支架的中心位置设置有位移传感器,所述位移传感器的下方设置有接触座。
4、进一步的,所述柔性夹爪的数量设置为两对,两对所述柔性夹爪前后并列布置。
5、再进一步的,所述接触座包括本体和挡块,所述本体上开设有用于安装所述位移传感器的测量杆的安装槽,所述挡块设置在所述安装槽的外侧,所述挡块与所述本体连接在一起。
6、再进一步的,所述接触座采用塑料材质。
7、与现有技术相比,本实用新型的有益技术效果:
8、本实用新型的柔性夹持机构安装在六轴机械臂上,利用六轴机械臂带动柔性夹持机构捕捉鱼,提高了捕鱼效率,降低了工作人员的劳动强度;本实用新型采用被动式夹持机构,当鱼触碰到接触座后,柔性夹爪才会对鱼进行抓取,减少活体的抓取难度,从响应速度上提高了抓取的成功率。
技术特征:
1.一种基于嵌入式的水下被动柔性夹持机构,其特征在于:包括支架(1),所述支架(1)设置在六轴机械臂(8)的工作端,所述支架(1)的底部设置有安装座(2),所述安装座(2)的底部设置有气动滑轨(3),所述气动滑轨(3)的左右两侧设置有滑块(4),所述滑块(4)的底部设置有柔性夹爪(5),所述支架(1)的中心位置设置有位移传感器(6),所述位移传感器(6)的下方设置有接触座(7)。
2.根据权利要求1所述的基于嵌入式的水下被动柔性夹持机构,其特征在于:所述柔性夹爪(5)的数量设置为两对,两对所述柔性夹爪(5)前后并列布置。
3.根据权利要求1所述的基于嵌入式的水下被动柔性夹持机构,其特征在于:所述接触座(7)包括本体(7-1)和挡块(7-2),所述本体(7-1)上开设有用于安装所述位移传感器(6)的测量杆的安装槽(7-1-1),所述挡块(7-2)设置在所述安装槽(7-1-1)的外侧,所述挡块(7-2)与所述本体(7-1)连接在一起。
4.根据权利要求1所述的基于嵌入式的水下被动柔性夹持机构,其特征在于:所述接触座(7)采用塑料材质。
技术总结
本技术公开了一种基于嵌入式的水下被动柔性夹持机构,属于夹具设备技术领域,包括支架,支架设置在六轴机械臂的工作端,支架的底部设置有安装座,安装座的底部设置有气动滑轨,气动滑轨的左右两侧设置有滑块,滑块的底部设置有柔性夹爪,支架的中心位置设置有位移传感器,位移传感器的下方设置有接触座。本技术的柔性夹持机构安装在六轴机械臂上,利用六轴机械臂带动柔性夹持机构捕捉鱼,提高了捕鱼效率,降低了工作人员的劳动强度;本技术采用被动式夹持机构,当鱼触碰到接触座后,柔性夹爪才会对鱼进行抓取,减少活体的抓取难度,从响应速度上提高了抓取的成功率。
技术研发人员:郝春晖
受保护的技术使用者:沈阳化工大学
技术研发日:20240426
技术公布日:2024/12/19
技术研发人员:郝春晖
技术所有人:沈阳化工大学
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除