茄子采摘机器人
本发明属于农业机械,具体涉及茄子采摘机器人。
背景技术:
1、茄子是日常饮食不可或缺的健康蔬菜。中国作为全球最大的茄子生产国,种植面积在全球比重常年达42%以上。茄子成熟时,应及时采收,避免采收不及时,造成果实变老,果肉肉质疏松,品质下降。由于茄子茎部木质化程度高,比其他果蔬粗壮,剪切强度大。目前,茄子采摘基本采用人工方式通过剪刀从蒂部将茄子剪下,放置在菜篮里,这种方式劳动强度大,采摘效率低。
技术实现思路
1、本发明的目的是提供茄子采摘机器人,解决现有茄子采摘工作中人工作业劳动强度大、效率低下的问题。
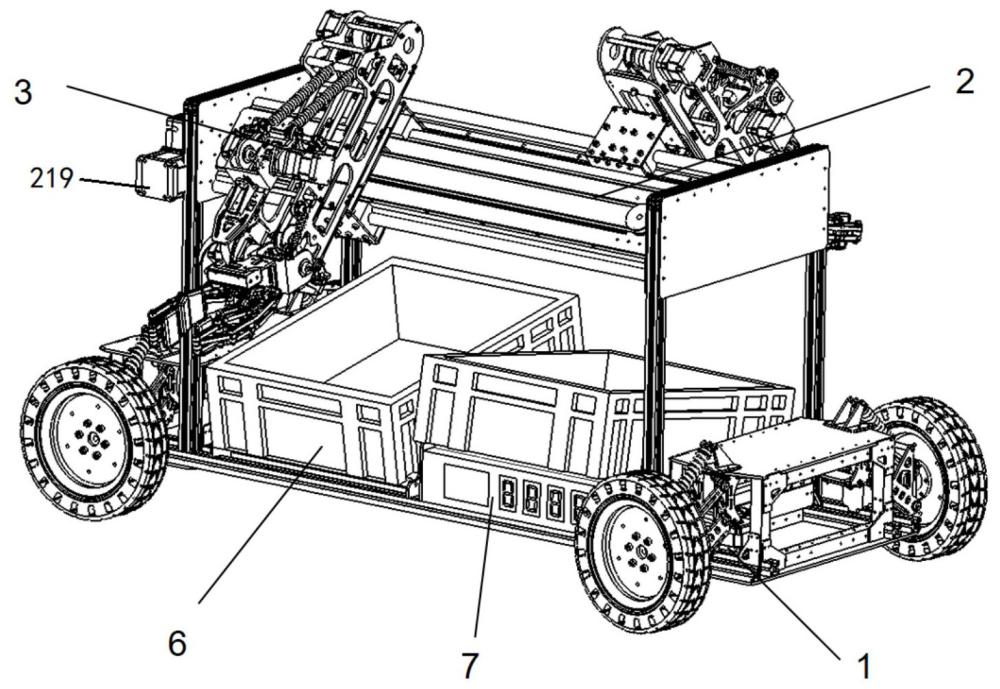
2、本发明所采用的技术方案是,茄子采摘机器人,包括行走模块,行走模块上设置有位姿调整模块和储菜篮,位姿调整模块上设置有采摘模块。
3、本发明的特点还在于,
4、行走模块包括底板,底板的两端分别设置有连接架,每个连接架的两端均连接有悬挂轮组,底板上且位于两个连接架之间设置有储菜篮,底板上且位于前侧的连接架与储菜篮之间设置有前侧横梁支撑架,底板上且位于后侧的连接架与储菜篮之间设置有后侧横梁支撑架,前侧横梁支撑架与后侧横梁支撑架远离底板的一端通过位姿调整模块连接,位于前侧的两个悬挂轮组连接有前轮转向机构。
5、储菜篮的底部设置有称重计,称重计的底部设置有倾斜支架,倾斜支架底部与底板连接。
6、位姿调整模块包括横梁前板和横梁后板,横梁前板和横梁后板之间通过两个横梁连接,两个横梁沿横梁前板的轴线对称设置,两个横梁位于同一侧的端部均连接有轴承连接块,其中一个轴承连接块上设置有联轴器连接块,另一个轴承连接块上设置有位姿调整模块联轴器,联轴器连接块与前侧横梁支撑架的侧壁转动连接,位姿调整模块联轴器穿过后侧横梁支撑架的侧壁与蜗轮蜗杆减速箱连接,蜗轮蜗杆减速箱与第二电机连接,两个横梁相背离的侧壁上均设置有圆导轨,每个圆导轨上均设置有圆导轨滑块,每个圆导轨滑块远离横梁的侧壁上均连接有滑块板,两个滑块板位于同一侧的端部均通过滑台板连接,横梁后板上且沿其轴向设置有第一直线导轨,第一直线导轨上设置有直线导轨滑块,直线导轨滑块与其靠近的滑台板连接,横梁后板的一端内嵌有第一电机,第一电机连接有减速箱,减速箱的输出轴穿过横梁前板且连接有同步带轮,横梁前板远离第一电机的一端连接有销轴,销轴上套设有轴承,轴承上套设有同步带轮,两个同步带轮通过同步带连接,同步带靠近另一个滑台板的端面设置为齿形端面,同步带的齿形端面与设置有齿形端面的同步带固定板啮合,同步带固定板远离齿形端面的一端与另一个滑台板连接。
7、采摘模块包括平行设置的左机架和右机架,左机架和右机架的底部通过机架连接,左机架和右机架的顶部且位于中部位置均设置有凸起,右机架上的凸起连接有第三电机,第三电机连接有减速箱,减速箱的输出轴通过联轴器与第一切割小臂的一端连接,左机架上的凸起与第二切割小臂的一端转动连接,第一切割小臂的另一端与u型切割旋转头的一端转动连接,第二切割小臂的另一端套设于减速箱的输出轴上,减速箱连接有第四电机,减速箱的输出轴通过联轴器与u型切割旋转头的另一端连接, u型切割旋转头的闭口端连接有伸缩式剪刀,左机架和右机架的顶部之间连接有拉簧挂轴,拉簧挂轴上设置有两个卡口,每个卡口均连接有第一拉簧的一端,两个第一拉簧的另一端分别与第一切割小臂、第二切割小臂连接,机架上且沿其轴向设置有第二直线导轨,机架上且位于第二直线导轨的两侧均设置有通槽,第二直线导轨上设置有滑块模块且所述滑块模块穿过通槽与靠近同步带的滑台板连接,第二直线导轨远离拉簧挂轴的一端设置有从动带轮支撑架,从动带轮支撑架转动连接有机械臂从动同步带轮,右机架远离从动带轮支撑架的一端设置有第五电机,第五电机连接有减速箱,减速箱的输出轴通过联轴器连接有机械臂主动同步带轮,机械臂主动同步带轮和机械臂从动同步带轮通过机械臂同步带连接,机械臂同步带与滑块模块连接,右机架远离从动带轮支撑架)的一端设置有第六电机,第六电机连接有减速箱,减速箱的输出轴通过联轴器与u型手爪旋转头的一端连接, u型手爪旋转头的另一端与左机架的端部转动连接, u型手爪旋转头与第二拉簧的一端连接,第二拉簧的另一端与左机架连接,u型手爪旋转头的闭口端连接有柔性欠驱动手爪。
8、滑块模块包括设置于第二直线导轨上的滑块,滑块的顶部设置有同步带卡槽,同步带卡槽的上表面上设置有凹槽,同步带卡槽上设置有压板,压板的下表面设置有第一齿形凸起,第一齿形凸起与凹槽对应,第一齿形凸起与凹槽分别设置于机械臂同步带两侧,第一齿形凸起与机械臂同步带上设置的齿形凸起啮合,同步带卡槽的四个角均连接有铜柱,四个铜柱远离同步带卡槽的一端穿过通槽与滑块底板连接,滑块底板与靠近同步带的滑台板连接。
9、伸缩式剪刀括切割支架,切割支架的一端与u型切割旋转头的闭口端连接,切割支架的底部连接有切割机架,切割机架远离切割支架的一端对称的设置有两个切割机架的导向槽,每个切割机架的导向槽内均设置有铜套,每个铜套内均套设有塞打螺钉,塞打螺钉的螺纹端穿过切割机架的导向槽连接有螺帽,螺帽的外径大于切割机架的导向槽的宽度,其中一个铜套通过法兰轴承与右刀片的一端连接,另一个铜套通过法兰轴承与左刀片的一端连接,右刀片与左刀片的中心通过销轴连接,销轴的底端与电缸的伸缩端连接,电缸的固定端与切割机架的底部连接。
10、柔性欠驱动手爪包括与u型手爪旋转头闭口端连接的手爪支架,手爪支架的顶端连接有气缸安装板,气缸安装板的底部连接有旋转气缸,手爪支架的底部通过转轴转动连接有第二齿轮,第二齿轮和第一齿轮啮合,第一齿轮与旋转气缸连接,第一齿轮和第二齿轮上均与第一连杆的一端连接,每个第一连杆的另一端均铰接有欠驱动手指,每个欠驱动手指的内侧均与第二连杆的一端铰接,每个第二连杆的另一端均通过转轴与手爪支架的底部转动连接。
11、每个欠驱动手指的内侧均设置有硅胶垫。
12、机架靠近u型手爪旋转头的一端设置有深度相机,第一切割小臂靠近u型切割旋转头的一端、左机架的凸起上、左机架靠近u型手爪旋转头的一端、机架靠近第五电机的一端的上表面、后侧横梁支撑架远离第二电机的一侧、横梁后板的下表面均设置有限位开关。
13、本发明的有益效果是:
14、(1)本发明茄子采摘机器人,可同时设置两组采摘机构,同时对两侧的茄子,大大提高了采摘效率;
15、(2)本发明茄子采摘机器人,位姿调整模块和采摘模块共设置有6个电机,自由度为6,可以灵活采摘到空间覆盖范围内的所有茄子;
16、(3)本发明茄子采摘机器人,设置有蜗轮蜗杆减速机,断电之后可以机械自锁,采摘模块不会因为重力而掉下来,安全性高;
17、(4)本发明茄子采摘机器人,通过设置第一拉簧和第二拉簧,能够平衡掉第一切割小臂38、柔性欠驱动手爪5的重力,使电机在断电时可以维持原机械臂位姿,不受重力影响,实现自主力平衡;
18、(5)本发明茄子采摘机器人,通过柔性欠驱动手爪夹持茄子,在保证稳定夹持各种各样形状各异的茄子的同时减少对茄子的伤害,完成对茄子的采摘;
19、(6)本发明茄子采摘机器人,通过电缸的伸缩剪切茄子藤茎,刀片运动轨迹由优化设计的轨道决定,具有剪切速度快,剪切力大,的特点。
技术研发人员:李艳,丘嘉颀,刘昊鑫,陈俊良,刘书恒,赵宇凡
技术所有人:西安理工大学
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除