图像翻转失效监控方法、装置、计算机设备及存储介质与流程
本申请涉及航空电子系统,尤其涉及一种图像翻转失效监控方法、装置、设备及存储介质。
背景技术:
1、视景增强技术是一种利用成像传感器来提供飞机前方外部场景的电子手段,成像传感器可以选用前视红外、毫米波辐射测量、毫米波雷达、微光增强或其他实时成像技术,从而产生外部场景的实时图像。增强视景系统(enhanced vi s ion system,evs)是一种采用红外探测器实时获取飞机前方外部视景图像的机载电子设备,红外传感器安装在飞机头部,接收来自外界物体的热辐射,经光电转换和图像处理后,形成外部视景的红外图像,经过与平显符号画面叠加显示在平视显示器(head-up di sp l ay,hud)上,通过红外增强视景系统可增强飞行员在夜间、雾、霾、雨、雪等低能见度天气下的着陆和起飞。
2、随着红外探测技术不断发展,探测器在弱光环境下的探测性能不断提升,可探测的红外光波段不断增多,下一代增强视景系统为了给飞行员提供更加丰富的飞机外部视景数据,正朝着多波段红外探测方向发展。现有增强视景系统设备以宽波段居多,均为中长波红外波段,缺少可见光成像波段与短波成像波段。而民航机场建设过程中传统的以卤素灯、金属卤化物、溴钨为光源的机场助航灯光逐渐被以发光二极管(led)为光源的灯光替代,led灯光为冷光源其光谱辐射特性对于红外探测来说不可见。
3、增强视景设备可安装于飞机机头上部位置或下部位置,两种安装位置对增强视景设备安装方向有不同的要求,两种安装方式相差180°。因此增强视景设备通过读取存储于存储器中的正反控制参数控制输出画面方向,以保证为飞行员显示的视景画面与外部视景方向一致。视频方向控制参数存储于设备内部rom中,飞机在高空中运行时大气层带电粒子辐射较强,当带点粒子击中存储芯片某一存储位时,可能会导致视频输出方向会发生翻转。
技术实现思路
1、本申请实施例提供一种图像翻转失效监控方法、装置、计算机设备及存储介质,用于实现图像翻转失效监控。
2、本发明实施例提供一种图像翻转失效监控方法,所述方法包括:
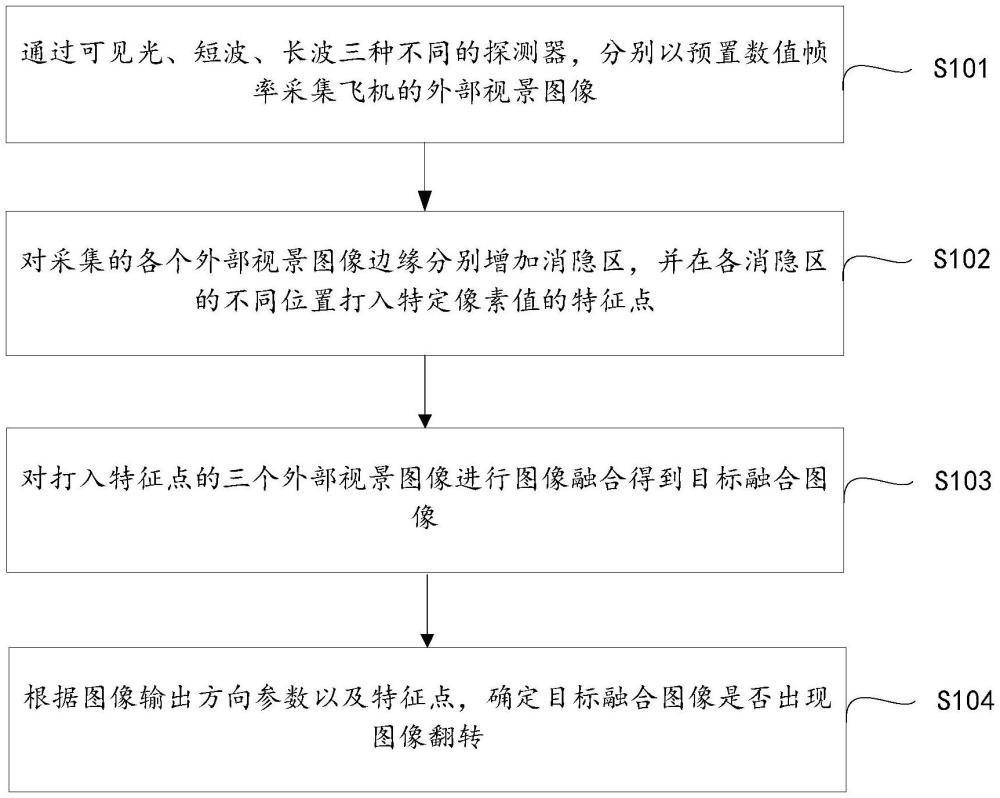
3、通过可见光、短波、长波三种不同的探测器,分别以预置数值帧率采集飞机的外部视景图像;
4、对采集的各个外部视景图像边缘分别增加消隐区,并按照在各消隐区的不同位置打入特定像素值的特征点;
5、对打入特征点的三个外部视景图像进行图像融合得到目标融合图像;
6、根据图像输出方向参数以及所述特征点,确定所述目标融合图像是否出现图像翻转。
7、在一个可选的实施例中,所述消隐区的初始灰度值默认为0;在所述消隐区打入所述特征点的像素灰度值为255。
8、在一个可选的实施例中,在第1个外部视景图像的消隐区的(x,y1)位置打入所述特征点;在第2个外部视景图像的消隐区的(x,y2)位置打入所述特征点;在第3个外部视景图像的消隐区的(x,y3)位置打入所述特征点。
9、在一个可选的实施例中,所述根据图像输出方向参数以及所述特征点,确定所述目标融合图像是否出现图像翻转,包括:
10、若所述图像输出方向参数为正向,根据(x,y1)、(x,y2)以及(x,y3)位置处的灰度值确定所述目标融合图像是否出现图像翻转;
11、若所述图像输出方向参数为顺时针旋转180°,根据位置(x,y1)、(x,y2)以及(x,y3)计算的目标位置坐标确定所述目标融合图像是否出现图像翻转。
12、在一个可选的实施例中,所述根据(x,y1)、(x,y2)以及(x,y3)位置处的灰度值确定所述目标融合图像是否出现图像翻转,包括:
13、若(x,y1)、(x,y2)以及(x,y3)位置处的灰度值均为255,则确定所述目标融合图像未出现图像翻转;
14、若(x,y1)、(x,y2)以及(x,y3)位置中任意一处的灰度值不为255,则确定所述目标融合图像出现图像翻转。
15、在一个可选的实施例中,所述根据位置(x,y1)、(x,y2)以及(x,y3)计算的目标位置坐标确定所述目标融合图像是否出现图像翻转,包括:
16、根据位置(x,y1)、(x,y2)以及(x,y3)计算新的位置坐标(m-x-1,n-y1-1)、(m-x-1,n-y2-1)以及(m-x-1,n-y3-1);
17、根据新的位置坐标(m-x-1,n-y1-1)、(m-x-1,n-y2-1)以及(m-x-1,n-y3-1),确定所述目标融合图像是否出现图像翻转。
18、在一个可选的实施例中,所述根据新的位置坐标(m-x-1,n-y1-1)、(m-x-1,n-y2-1)以及(m-x-1,n-y3-1),确定所述目标融合图像是否出现图像翻转,包括:
19、若新的位置坐标(m-x-1,n-y1-1)、(m-x-1,n-y2-1)以及(m-x-1,n-y3-1)的灰度值均为255,则确定所述目标融合图像未出现图像翻转;
20、若新的位置坐标(m-x-1,n-y1-1)、(m-x-1,n-y2-1)以及(m-x-1,n-y3-1)中任意一处的灰度值不为255,则确定所述目标融合图像出现图像翻转。
21、本发明实施例提供一种图像翻转失效监控装置,所述装置包括:
22、采集模块,用于通过可见光、短波、长波三种不同的探测器,分别以预置数值帧率采集飞机的外部视景图像;
23、特征点打入模块,用于对采集的各个外部视景图像边缘分别增加消隐区,并按照在各消隐区的不同位置打入特定像素值的特征点;
24、融合模块,用于对打入特征点的三个外部视景图像进行图像融合得到目标融合图像;
25、确定模块,用于根据图像输出方向参数以及所述特征点,确定所述目标融合图像是否出现图像翻转。
26、一种计算机程序产品,所述计算机程序产品包括计算机程序,所述计算机程序被处理器执行时实现上述的图像翻转失效监控方法。
27、本发明提供一种图像翻转失效监控方法、装置、计算机设备及存储介质,首先通过可见光、短波、长波三种不同的探测器,分别以预置数值帧率采集飞机的外部视景图像;然后对采集的各个外部视景图像边缘分别增加消隐区,并按照在各消隐区的不同位置打入特定像素值的特征点;对打入特征点的三个外部视景图像进行图像融合得到目标融合图像;根据图像输出方向参数以及所述特征点,确定所述目标融合图像是否出现图像翻转。由于实施例中的特征点为在进行图像融合之前预先打入的,因此获取到目标融合图像之后,通过目标融合图像中的特征点的图像灰度值便可以确定是否出现图像翻转。
技术特征:
1.一种图像翻转失效监控方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述消隐区的初始灰度值默认为0;在所述消隐区打入所述特征点的像素灰度值为255。
3.根据权利要求2所述的方法,其特征在于,在第1个外部视景图像的消隐区的(x,y1)位置打入所述特征点;在第2个外部视景图像的消隐区的(x,y2)位置打入所述特征点;在第3个外部视景图像的消隐区的(x,y3)位置打入所述特征点。
4.根据权利要求3所述的方法,其特征在于,所述根据图像输出方向参数以及所述特征点,确定所述目标融合图像是否出现图像翻转,包括:
5.根据权利要求4所述的方法,其特征在于,所述根据(x,y1)、(x,y2)以及(x,y3)位置处的灰度值确定所述目标融合图像是否出现图像翻转,包括:
6.根据权利要求4所述的方法,其特征在于,所述根据位置(x,y1)、(x,y2)以及(x,y3)计算的目标位置坐标确定所述目标融合图像是否出现图像翻转,包括:
7.根据权利要求6所述的方法,其特征在于,所述根据新的位置坐标(m-x-1,n-y1-1)、(m-x-1,n-y2-1)以及(m-x-1,n-y3-1),确定所述目标融合图像是否出现图像翻转,包括:
8.一种图像翻转失效监控装置,其特征在于,所述装置包括:
9.一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至7任一项所述的图像翻转失效监控方法。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述的图像翻转失效监控方法。
技术总结
本申请提供了一种图像翻转失效监控方法、装置、设备及存储介质,涉及航空电子技术领域,用于实现图像翻转失效监控。方法主要包括:通过可见光、短波、长波三种不同的探测器,分别以预置数值帧率采集飞机的外部视景图像;对采集的各个外部视景图像边缘分别增加消隐区,并按照在各消隐区的不同位置打入特定像素值的特征点;对打入特征点的三个外部视景图像进行图像融合得到目标融合图像;根据图像输出方向参数以及所述特征点,确定所述目标融合图像是否出现图像翻转。
技术研发人员:吴狄,姚鑫鹏,张鹏帆,钱一萍,梁超然,祝献捷
受保护的技术使用者:中国商用飞机有限责任公司北京民用飞机技术研究中心
技术研发日:
技术公布日:2024/11/14
技术研发人员:吴狄,姚鑫鹏,张鹏帆,钱一萍,梁超然,祝献捷
技术所有人:中国商用飞机有限责任公司北京民用飞机技术研究中心
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除