一种目标角度位置检测方法和系统
本申请属于阵列信号处理,具体涉及一种目标角度位置检测方法和系统。
背景技术:
1、目前,采用虚拟插值技术实现目标角度位置检测的技术已经得到广泛发展和应用。其中,基于虚拟差值技术获得目标角度位置的方法指的是通过虚拟插值技术获得虚拟阵列,并在虚拟阵列上完成波达方向(direction of arrival,doa)估计。但是插值技术存在角度敏感问题,即当信号落在内插区域外或内插区域过大时变换误差增大,变换性能快速恶化。针对该问题,b.friedlander等提出多区域内插技术,在每个子区域上分别进行内插变换,最后再进行综合,但是该技术在子区域划分过多时,会引入综合误差,影响变换结果。胡丹婷等对虚拟阵列的变换误差进行权值约束处理,增加了内插变换波束形成的插值角度范围,但是该技术中对算法性能影响较大的加权系数,需要根据经验来确定。梅笑冰针对型矩阵提出内插区域对称扩展优化的方法,实现了俯仰角与方位角内插变换区域的二倍对称扩展,但并不适用于任意阵列。
技术实现思路
1、为了解决现有基于插值技术的目标角度位置检测技术存在的问题,本申请提供了一种目标角度位置检测方法和系统,本申请提出一种以阵列流行中角度函数的值域为内插对象,将真实阵列转化为虚拟阵列,以此获得目标角度位置信息,本申请采用一种基于值域的新型内插技术,能够有效缓解虚拟内插技术中存在的角度敏感问题,提升变换误差性能。
2、本申请通过下述技术方案实现:
3、一种目标角度位置检测方法,所述方法包括:
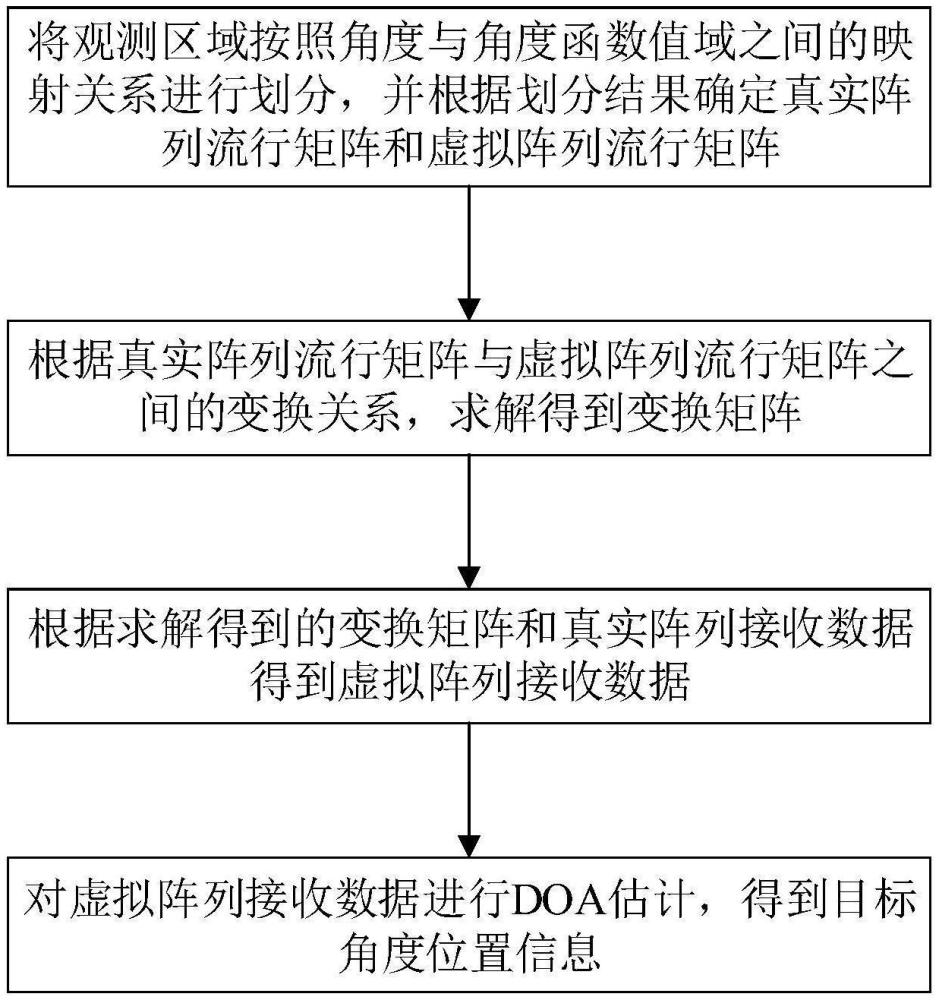
4、以真实阵列结构和虚拟阵列结构为基础,将观测区域按照角度与角度函数值域之间的映射关系进行划分,并根据划分结果确定真实阵列流行矩阵和虚拟阵列流行矩阵;
5、根据所述真实阵列流行矩阵和虚拟阵列流行矩阵之间的变换关系,求解得到变换矩阵;
6、根据求解得到的所述变换矩阵和真实阵列接收数据得到虚拟阵列接收数据;
7、对所述虚拟阵列接收数据进行doa估计,得到目标角度位置信息。
8、在一些实施方式中,所述的观测区域划分以及根据划分结果确定真实阵列流行矩阵和虚拟阵列流行矩阵步骤,具体包括:
9、将所述观测区域的角度范围转换为角度函数值域;
10、按照内插步长对所述角度函数值域进行划分;
11、根据所述划分结果,得到真实阵列的阵列流行矩阵和虚拟阵列的阵列流行矩阵。
12、在一些实施方式中,所述的观测区域划分以及根据划分结果确定真实阵列流行矩阵和虚拟阵列流行矩阵步骤,还包括:
13、根据角度与角度函数阈值之间的映射关系修改所述内插步长。
14、在一些实施方式中,所述的观测区域划分以及根据划分结果确定真实阵列流行矩阵和虚拟阵列流行矩阵步骤,还包括:
15、当所述观测区域大于阈值时,对所述观测区域进行嵌套划分,即首先将所述观测区域划分为多个子区域;然后针对每个子区域分别按照其对应的角度与角度函数值域的映射关系进行划分。
16、在一些实施方式中,所述的变换矩阵求解步骤,具体包括:
17、根据所述真实阵列流行矩阵a与虚拟阵列流行矩阵a存在的固定变换关系采用最小二乘法,求解得到变换矩阵b:
18、
19、在一些实施方式中,所述的变换矩阵求解步骤,还包括:
20、在最小二乘法求解的基础上,进一步采用奇异值分解法,对所述真实阵列流行矩阵a进行奇异值分解,得到:
21、a=u[∑0][v1v2]h
22、其中,u∈cm×m,∑∈cm×m,v1∈cp×m,v2∈cp×(p-m),c为复数空间,p为插值数,m为阵元数;
23、则可以得到变换矩阵b:
24、
25、在一些实施方式中,所述的虚拟阵列接收数据的获取步骤,具体包括:
26、根据虚拟阵列接收数据模型得到所述虚拟阵列接收数据协方差矩阵:其中,x(t)为真实阵列接收数据。
27、在一些实施方式中,所述的虚拟阵列接收数据的获取步骤,还包括:
28、当所述观测区域大于阈值时,对所述观测区域进行嵌套划分,即首先将所述观测区域划分为多个子区域;然后针对每个子区域分别按照其对应的角度与角度函数值域的映射关系进行划分;
29、根据各个子区域的划分结果,得到其对应的真实阵列流行矩阵和虚拟阵列流行矩阵;
30、根据各个子区域的真实阵列流行矩阵和虚拟阵列流行矩阵,得到其对应的变换矩阵;
31、根据各个子区域的变换矩阵和真实阵列接收数据,得到其对应的虚拟阵列接收数据协方差矩阵;
32、采用算术平均求和的方法对各个子区域的协方差矩阵进行综合,得到所述观测区域对应的虚拟阵列接收数据协方差矩阵。
33、在一些实施方式中,所述的目标角度位置信息获取步骤,具体包括:
34、对所述虚拟阵列接收数据协方差矩阵进行预白化处理;
35、以预白化处理后的协方差矩阵为基础,采用tls-esprit算法或music算法搜索获得目标角度位置信息。
36、另一方面,本申请提出了一种目标角度位置检测系统,所述系统包括:
37、内插划分模块,所述内插划分模块以真实阵列结构和虚拟阵列结构为基础,将观测区域按照角度与角度函数值域之间的映射关系进行划分,并根据所述划分结果确定真实阵列流行矩阵和虚拟阵列流行矩阵;
38、求解模块,所述求解模块根据所述真实阵列流行矩阵与虚拟阵列流行矩阵之间的变换关系,求解得到变换矩阵;
39、变换模块,所述变换模块根据求解得到的所述变换矩阵和真实阵列接收数据得到虚拟阵列接收数据;
40、以及,估计模块,所述估计模块对所述虚拟阵列接收数据进行doa估计,得到目标角度位置信息。
41、本申请提出的一种目标角度位置检测方法和系统,采用一种基于值域的内插算法,即以阵列流行中角度函数的值域作为内插对象,将真实阵列转化为虚拟阵列,并在虚拟阵列上进行doa估计,得到目标角度位置信息;本申请通过采用新的内插算法,能够大大缓解传统虚拟内插技术中存在的角度敏感问题,提升了变换误差性能。
42、本申请提出的一种目标角度位置检测方法和系统,具有良好的适应性,可用于实现任意阵列的内插变换,且虚拟阵列的阵元数对变换误差性能的影响较小,即在不同变换区域和不同虚拟阵元数的情况下均能保持良好的性能,能够较为准确地检测出目标角度位置;
43、本申请提出的一种目标角度位置检测方法和系统,检测结果较为准确,误差较小,具有良好的实用性。
技术特征:
1.一种目标角度位置检测方法,其特征在于,所述方法包括:
2.根据权利要求1所述的一种目标角度位置检测方法,其特征在于,所述的观测区域划分以及根据划分结果确定真实阵列流行矩阵和虚拟阵列流行矩阵步骤,具体包括:
3.根据权利要求2所述的一种目标角度位置检测方法,其特征在于,所述的观测区域划分以及根据划分结果确定真实阵列流行矩阵和虚拟阵列流行矩阵步骤,还包括:
4.根据权利要求2所述的一种目标角度位置检测方法,其特征在于,所述的观测区域划分以及根据划分结果确定真实阵列流行矩阵和虚拟阵列流行矩阵步骤,还包括:
5.根据权利要求1-4任一项所述的一种目标角度位置检测方法,其特征在于,所述的变换矩阵求解步骤,具体包括:
6.根据权利要求5所述的一种目标角度位置检测方法,其特征在于,所述的变换矩阵求解步骤,还包括:
7.根据权利要求5所述的一种目标角度位置检测方法,其特征在于,所述的虚拟阵列接收数据的获取步骤,具体包括:
8.根据权利要求7所述的一种目标角度位置检测方法,其特征在于,所述的虚拟阵列接收数据的获取步骤,还包括:
9.根据权利要求7所述的一种目标角度位置检测方法,其特征在于,所述的目标角度位置信息获取步骤,具体包括:
10.一种目标角度位置检测系统,其特征在于,所述系统包括:
技术总结
本申请公开了一种目标角度位置检测方法和系统,该方法包括:以真实阵列结构和虚拟阵列结构为基础,将观测区域按照角度与角度函数值域之间的映射关系进行划分,并根据划分结果确定真实阵列流行矩阵和虚拟阵列流行矩阵;根据真实阵列流行矩阵和虚拟阵列流行矩阵之间的变换关系,求解得到变换矩阵;根据变换矩阵和真实阵列接收数据得到虚拟阵列接收数据;对虚拟阵列接收数据进行DOA估计,得到目标角度位置信息。本申请采用一种基于值域的新型内插技术,能够有效缓解虚拟内插技术中存在的角度敏感问题,提升变换误差性能。
技术研发人员:舒勤,李涛,王畅,钟俊,范宇,冯茂原,毕潇文
受保护的技术使用者:四川大学
技术研发日:
技术公布日:2024/11/14
技术研发人员:舒勤,李涛,王畅,钟俊,范宇,冯茂原,毕潇文
技术所有人:四川大学
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除