一种无人机物料的确定方法、装置、设备及介质与流程
本发明涉及无人机,尤其涉及一种无人机物料的确定方法、装置、设备及介质。
背景技术:
1、无人机是一种无人驾驶飞机,能够受无线电遥控设备和自备程序的控制。将无人机应用至农林植物保护作业中,可以实现对植物的播撒等操作,提高植保作业的效率。
2、农业上使用无人机播撒时,实时获取剩余物料/药剂重量是实现精准播撒的关键。目前的无人机通过称重传感器估计当前剩余物料/药剂的重量,在估计到物料不足时中断作业。同时,无人机通过作业前的校准操作获得滚轮转速与下料速率之间的映射关系,在作业时利用该映射控制滚轮转速。虽然剩余物料与下料记录之间有显而易见的关系,但在实际作业中这两者的估计算法毫无关联,导致了如下问题:第一,剩余物料估计受称重传感器影响,信噪比低且不稳定。因飞机加速度和飞行震动导致的重力变化时刻影响着称重传感器的读数,以致剩余物料估计非常不准。第二,现有技术所采用的预校准方法没有考虑到无人机在空中飞行的实际状况,也没有考虑到播撒肥料时出现的“粘滞”现象。
技术实现思路
1、本发明提供了一种无人机物料的确定方法、装置、设备及介质,通过引入粘滞系数的概念,根据实时称重数据和校准数据可以实时输出剩余物料,提高了剩余物料的准确性。
2、根据本发明的一方面,提供了一种无人机物料的确定方法,包括:
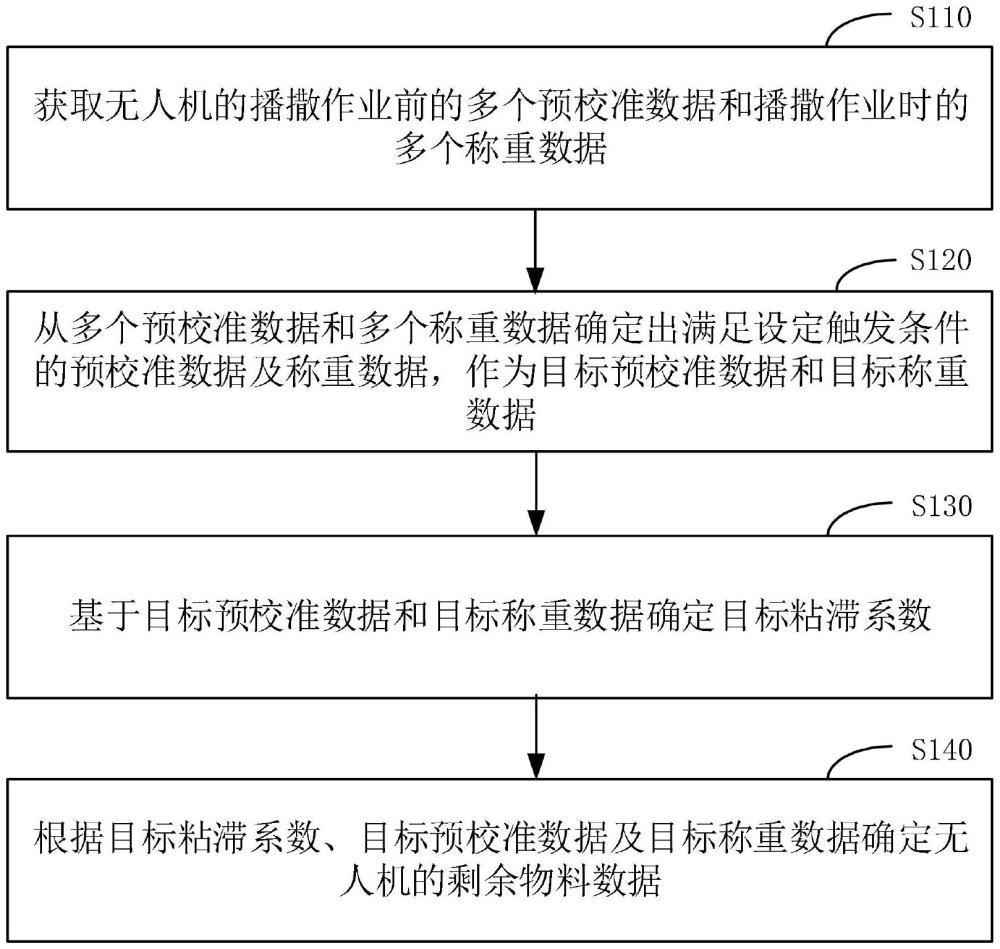
3、获取无人机的播撒作业前的多个预校准数据和播撒作业时的多个称重数据;
4、从所述多个预校准数据和多个称重数据确定出满足设定触发条件的预校准数据及称重数据,作为目标预校准数据和目标称重数据;
5、基于所述目标预校准数据和所述目标称重数据确定目标粘滞系数;
6、根据所述目标粘滞系数、所述目标预校准数据及所述目标称重数据确定无人机的剩余物料数据。
7、可选的,所述预校准数据包括滚轮转动数据;
8、从所述多个预校准数据和多个称重数据确定出满足设定触发条件的预校准数据及称重数据,作为目标预校准数据和目标称重数据,包括:
9、判断所述称重数据是否满足可靠性条件,以及当前时刻对应的称重数据是否小于上一时刻对应的称重数据;其中,所述当前时刻与所述上一时刻间隔设定时间;
10、判断在所述设定时间之间的所述滚轮转动数据是否满足转动条件;
11、若所述称重数据满足可靠性条件、当前时刻对应的称重数据小于上一时刻对应的称重数据,以及在所述设定时间之间的所述滚轮转动数据满足转动条件,则所述预校准数据和所述称重数据满足粘滞系数的设定触发条件;
12、将满足设定触发条件的预校准数据及称重数据确定为目标预校准数据和目标称重数据。
13、可选的,判断所述称重数据是否满足可靠性条件,包括:
14、获取所述无人机的实时重力加速度;
15、对所述称重数据进行滤波处理,得到滤波后的称重数据;
16、确定所述滤波后的称重数据和称重数据的第一差值,以及实时重力加速度和标准重力加速度的第二差值;
17、若所述第一差值小于设定阈值,且所述第二差值处于设定范围,则所述称重数据满足可靠性条件。
18、可选的,根据所述目标粘滞系数、所述目标预校准数据及所述目标称重数据确定无人机的剩余物料数据,包括:
19、获取当前时刻对应的目标粘滞系数、目标预校准数据及目标称重数据,以及上一时刻的目标预校准数据和目标称重数据;
20、根据所述当前时刻对应的目标粘滞系数、目标预校准数据及目标称重数据,以及上一时刻的目标预校准数据和目标称重数据确定无人机的剩余物料数据。
21、可选的,还包括:
22、通过所述目标粘滞系数判断所述无人机是否出现堵塞情况;
23、若所述无人机出现堵塞情况,则所述无人机停止播撒作业。
24、可选的,通过所述目标粘滞系数判断所述无人机是否出现堵塞情况,包括:
25、若所述目标粘滞系数为第一设定值,则无人机未出现堵塞情况;
26、若所述目标粘滞系数为第二设定值,则无人机出现堵塞情况。
27、可选的,基于所述目标预校准数据和所述目标称重数据确定目标粘滞系数,包括:
28、根据所述目标预校准数据和所述目标称重数据通过最小二乘法估计目标粘滞系数。
29、根据本发明的另一方面,提供了一种无人机物料的确定装置,包括:
30、数据获取模块,用于获取无人机的播撒作业前的多个预校准数据和播撒作业时的多个称重数据;
31、目标数据确定模块,用于从所述多个预校准数据和多个称重数据确定出满足设定触发条件的预校准数据及称重数据,作为目标预校准数据和目标称重数据;
32、目标粘滞系数确定模块,用于基于所述目标预校准数据和所述目标称重数据确定目标粘滞系数;
33、剩余物料数据确定模块,用于根据所述目标粘滞系数、所述目标预校准数据及所述目标称重数据确定无人机的剩余物料数据。
34、根据本发明的另一方面,提供了一种电子设备,所述电子设备包括:
35、至少一个处理器;以及
36、与所述至少一个处理器通信连接的存储器;其中,
37、所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行本发明任一实施例所述的无人机物料的确定方法。
38、根据本发明的另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现本发明任一实施例所述的无人机物料的确定方法。
39、本发明实施例的技术方案,通过获取无人机的播撒作业前的多个预校准数据和播撒作业时的多个称重数据;从所述多个预校准数据和多个称重数据确定出满足设定触发条件的预校准数据及称重数据,作为目标预校准数据和目标称重数据;基于所述目标预校准数据和所述目标称重数据确定目标粘滞系数;根据所述目标粘滞系数、所述目标预校准数据及所述目标称重数据确定无人机的剩余物料数据。本技术方案,通过引入粘滞系数的概念,根据实时称重数据和校准数据可以实时输出剩余物料,提高了剩余物料的准确性。
40、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种无人机物料的确定方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述预校准数据包括滚轮转动数据;
3.根据权利要求2所述的方法,其特征在于,判断所述称重数据是否满足可靠性条件,包括:
4.根据权利要求1所述的方法,其特征在于,根据所述目标粘滞系数、所述目标预校准数据及所述目标称重数据确定无人机的剩余物料数据,包括:
5.根据权利要求1所述的方法,其特征在于,还包括:
6.根据权利要求5所述的方法,其特征在于,通过所述目标粘滞系数判断所述无人机是否出现堵塞情况,包括:
7.根据权利要求1所述的方法,其特征在于,基于所述目标预校准数据和所述目标称重数据确定目标粘滞系数,包括:
8.一种无人机物料的确定装置,其特征在于,包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求1-7中任一项所述的无人机物料的确定方法。
技术总结
本发明实施例公开了一种无人机物料的确定方法、装置、设备及介质。其中,该方法包括:获取无人机的播撒作业前的多个预校准数据和播撒作业时的多个称重数据;从所述多个预校准数据和多个称重数据确定出满足设定触发条件的预校准数据及称重数据,作为目标预校准数据和目标称重数据;基于所述目标预校准数据和所述目标称重数据确定目标粘滞系数;根据所述目标粘滞系数、所述目标预校准数据及所述目标称重数据确定无人机的剩余物料数据。本技术方案,通过引入粘滞系数的概念,根据实时称重数据和校准数据可以实时输出剩余物料,提高了剩余物料的准确性。
技术研发人员:邓婷婷,朱翔,戴源远
受保护的技术使用者:拓攻(南京)机器人有限公司
技术研发日:
技术公布日:2024/11/14
技术研发人员:邓婷婷,朱翔,戴源远
技术所有人:拓攻(南京)机器人有限公司
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除