一种用于工业环境下的粉尘测量方法及装置与流程
本发明涉及粉尘检测,尤其涉及一种用于工业环境下的粉尘测量方法及装置。
背景技术:
1、粉尘是工业生产过程中产生的微小固体颗粒,这些颗粒能够悬浮在空气中。它们的产生源头广泛,包括水泥、面粉、金属材料加工和矿石爆破等一系列工业生产过程。其中,金属粉尘(如铅、铜、锌等)含有有毒物质,对人体健康构成潜在威胁,可能导致职业性尘肺病等严重疾病。并且在工业车间中悬浮的粉尘不仅会降低作业人员的视觉效能和工作效率,而且会影响产品的质量。更为严重的是,它还可能导致不安全行为和事故的发生。此外,悬浮粉尘还可能损坏精密仪器,给企业造成直接的经济损失。
2、公告号为cn115146526b的中国专利公开了发明公开了一种非平稳过程粉尘浓度预测方法,方法包括以下步骤:s1:记录一段时间内粉尘浓度随时间的变化值c(t);s2:利用变分模式分解法对c(t)进行分解,得到粉尘浓度随时间沉积趋势值、粉尘浓度随矿井工作状态周期变化值及具有平稳过程的粉尘浓度随时间波动值;s3:分别对粉尘浓度随时间沉积趋势值、粉尘浓度随矿井工作状态周期变化值及具有平稳过程的粉尘浓度随时间波动值进行预测,最终预测粉尘浓度。但是上述方案在高浓度和低浓度下的测量精度通常不够理想,并且在大量样品或多个检测点的情况下,无法满足精确监测的需求。因此,提供一种用于工业环境下的粉尘测量方法及装置,从而提升粉尘浓度的预测准确性,是非常有必要的。
技术实现思路
1、有鉴于此,本发明提出了一种用于工业环境下的粉尘测量方法及装置。通过传感器集合采集工厂环境参数、粉尘浓度数据等多维度数据,增强了基于数据的决策能力,同时通过回声状态网络对时间维度上的输入数据进行预测处理,以提高回声状态网络的短时记忆性,确保工厂内的粉尘浓度预测准确性。
2、本发明提供了一种用于工业环境下的粉尘测量方法,所述方法包括:
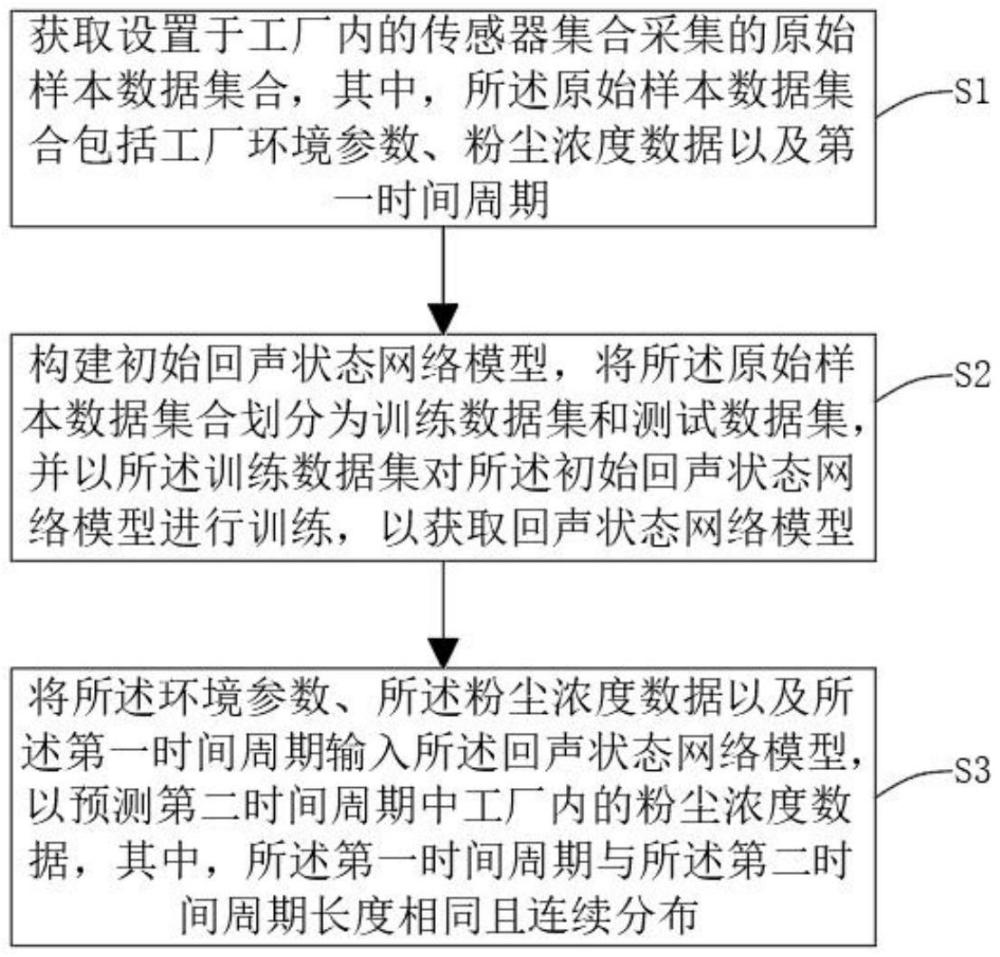
3、获取设置于工厂内的传感器集合采集的原始样本数据集合,其中,所述原始样本数据集合包括工厂环境参数、粉尘浓度数据以及第一时间周期;
4、构建初始回声状态网络模型,将所述原始样本数据集合划分为训练数据集和测试数据集,并以所述训练数据集对所述初始回声状态网络模型进行训练,以获取回声状态网络模型;
5、将所述环境参数、所述粉尘浓度数据以及所述第一时间周期输入所述回声状态网络模型,以预测第二时间周期中工厂内的粉尘浓度数据,其中,所述第一时间周期与所述第二时间周期长度相同且连续分布。
6、在以上技术方案的基础上,优选的,所述获取设置于工厂内的传感器集合采集的原始样本数据集合,具体包括:
7、根据设置于工厂内的所述传感器集合,分别采所述传感器集合中每个传感器设置位置对应的温度、湿度、光照强度以及风速;
8、根据每个传感器设置位置对应的光照强度和浓度转换函数,计算与所述光照强度对应的粉尘浓度数据。
9、在以上技术方案的基础上,优选的,所述浓度转换函数的表达式为:
10、
11、
12、
13、其中,i(θ)表示散射光强度,i0表示初始入射光强度,n表示粉尘颗粒的折射率,θ表示入射光与散射光之间的偏折角度,d表示粉尘颗粒的直径,λ表示入射光的波长,n表示散射强度,ρ表示粉尘颗粒的颗粒浓度,c表示粉尘浓度数据。
14、更进一步优选的,所述回声状态网络模型的输入层包含有k个神经元,储备池包含n个神经元,输出层包含l个神经元;
15、所述储备池的内部神经元更新函数表达式为:
16、x(l+1)=f(winu(l+1)+wx(l)+wbacky(l))
17、其中,x(l+1)表示第l+1时刻的储备池状态,f()表示所述回声状态网络模型中储备池状态的更新函数,win为输入层至到储备池的反馈矩阵,u(l+1)表示第l+1时刻的输入层状态,w表示储备池内的反馈矩阵,wback表示储备池的偏置项,y(l)表示第l时刻的输出层状态;
18、所述输出层的输出函数表达式为:
19、y(l+1)=f(wout(u(l+1),x(l),y(l)))
20、其中,y(l+1)表示第l+1时刻的输出层状态,f()表示所述回声状态网络模型的输出函数,x(l)表示第l时刻的储备池状态,wout表示输出层的反馈矩阵。
21、更进一步优选的,所述方法还包括:
22、基于所述传感器集合中各个传感器的位置更新函数,获取优化后的原始样本数据集合,其中,所述位置更新函数包括第一位置更新函数、第二位置更新函数以及固定测量位置函数。
23、更进一步优选的,所述第一位置更新函数的表达式为:
24、
25、其中,表示在第t+1次迭代中第一传感器的位置更新函数,i表示第i个传感器,t表示第t次迭代,表示第i个传感器在第t次迭代中的第j维的位置参数,α表示第一随机变量,itermax表示最大迭代次数,r2表示粉尘浓度警示值,st表示粉尘浓度安全值,q表示服从正态分布的第二随机变量,l表示标准参数矩阵。
26、更进一步优选的,所述第二位置更新函数的表达式为:
27、
28、其中,表示在第t+1次迭代中第二传感器的位置更新函数,表示当前传感器在第t+1次迭代中的最优位置参数,表示当前传感器在第t次迭代中的最差位置参数,m表示设置传感器的总数,a+表示标准伪逆矩阵。
29、更进一步优选的,所述固定测量位置函数的表达式为:
30、
31、其中,表示在第t+1次迭代中位置更新函数,表示当前传感器在第t次迭代中的最优位置参数,β表示阶跃控制参数,k表示与所述阶跃控制参数对应的随机数,fi表示第i个传感器的位置参数,fw表示第i个传感器的最优位置参数。
32、更进一步优选的,所述固定测量位置函数的表达式为:
33、
34、其中,表示在第t+1次迭代中位置更新函数,表示当前传感器在第t次迭代中的最优位置参数,β表示阶跃控制参数,k表示与所述阶跃控制参数对应的随机数,fi表示第i个传感器的位置参数,fw表示第i个传感器的最优位置参数。
35、在本技术的第二方面提供了一种用于工业环境下的粉尘测量装置,所述粉尘测量装置包括数据采集模块、模型构建模块以及浓度预测模块,其中,
36、所述数据采集模块用于获取设置于工厂内的传感器集合采集的原始样本数据集合,其中,所述原始样本数据集合包括工厂环境参数、粉尘浓度数据以及第一时间周期;
37、所述模型构建模块用于构建初始回声状态网络模型,将所述原始样本数据集合划分为训练数据集和测试数据集,并以所述训练数据集对所述初始回声状态网络模型进行训练,以获取回声状态网络模型;
38、所述浓度预测模块用于将所述环境参数、所述粉尘浓度数据以及所述第一时间周期输入所述回声状态网络模型,以预测第二时间周期中工厂内的粉尘浓度数据,其中,所述第一时间周期与所述第二时间周期长度相同且连续分布。
39、本发明提供的一种用于工业环境下的粉尘测量方法及装置相对于现有技术具有以下有益效果:
40、(1)通过传感器集合采集工厂环境参数、粉尘浓度数据等多维度数据,能够为回声状态网络模型的训练提供更加准确、全面的数据支持,增强了基于数据的决策能力,同时通过回声状态网络对时间维度上的输入数据进行预测处理,以提高回声状态网络的短时记忆性,能够能够更精准地捕捉和预测粉尘浓度变化,确保工厂内的粉尘浓度预测准确性,避免因粉尘浓度预测不灵敏导致的生产安全风险;
41、(2)通过采用预设比例将原始样本数据集合划分为训练集和测试集,有利于提高模型训练的针对性和有效性,同时基于训练集和测试集对初始回声状态网络模型进行迭代训练,不断优化模型的性能和精度,并以设置预定偏差值作为模型收敛的判断标准,以实现回声状态网络模型的自适应收敛控制,并有利于提高模型在新数据上的泛化能力,增强了整体的预测准确性。
技术研发人员:兰正悦,兰天佑,易灿灿,周文龙,韩国正
技术所有人:鄂广华邦化工(湖北)有限公司
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除