一种水下防碰撞超声多元阵列及障碍检测方法和系统
本发明属于水声信号处理领域,主要涉及一种水下防碰撞超声多元阵列及障碍检测方法。
背景技术:
1、水下防碰撞检测是无人水下航行器(uuv)安全航行或作业所面临的重大问题。无人水下航行器、潜航器、深潜器等水下平台在执行前进、转弯、上浮下潜等动作时,存在与水下障碍物发生碰撞的风险。无人水下航行器一旦与障碍物发生碰撞,将会造成不可估量的损失。为了保证安全,需要检测平台运动方向可能存在的障碍物,以便采取避碰措施。
2、现有技术中,潜艇等大型水中航行体主要依靠大型综合声纳系统进行测距,以达到防碰撞检测,但综合声纳系统是一个复杂系统,综合声纳系统包括情报收集、目标探测、海底测绘,通信导航等,避碰检测只是其中的一项任务,因而综合声纳系统的体积和重量均较大,故不能用于尺寸较小的无人水下航行器平台。
3、国内外针对无人水下航行器平台研制的避碰声纳载荷有两种类型,一种为多波束高分辨成像声纳,另一种为单波束环扫声纳。多波束高分辨成像声纳原本用于水下目标成像,其也可用于避碰距离检测。多波束高分辨成像声纳为了获取障碍物的高精度成像及距离信息,采用数百个高频换能器组成水声阵列,以提高成像分辨率;但因高频信息在水下衰减较快,因而无法探测远距离障碍物,多波束高分辨成像声纳的探测距离与成像分辨率无法同时满足;同时,多波束高分辨成像声纳必须安装在水下航行器的平台艏部横截面的位置,因而多波束高分辨成像声纳仅能探测航行方向前方的障碍物,无法探测航行器四周的障碍物;而在实际应用中,安装多波束高分辨成像声纳的位置与承担水下目标探测任务的前视声纳位置冲突,造成无法安装在水下航行器平台艏部。单波束环扫声纳是专门针对水下小型平台研制的避障设备,有机械扫描式和电子扫描式两种类型;单波束环扫声呐设备简单,但受工作方式、设计理念限制,其数据帧率低,探测速度慢,覆盖范围小,并且只能测量单波束环扫声纳安装所在平面可能存在的障碍物,不能探测平台上浮下潜方向的障碍物;同时,单波束环扫声纳无法与无人水下航行器共型安装,安装后凸出于无人水下航行器,凸出的单波束环扫声纳影响无人水下航行器的流体动力学性能,不能满足无人水下航行器流体性能要求。
4、综上所述,潜艇综合声纳系统体积庞大,不能用于尺寸较小的无人水下航行器;多波束高分辨成像声纳因高频声波在水下传播衰减快,探测距离短,探测方向单一,且多波束高分辨成像声纳安装位置与前视声纳的位置冲突,无法同时安装,应用困难;单波束环扫声纳数据帧率低、覆盖范围小,且不能与平台总体共型设计与安装,影响影响航行器流体性能;因此需要设计一种适用于尺寸较小的无人水下航行器避碰声纳,以解决上述问题。
技术实现思路
1、为了克服现有技术的不足,解决潜艇综合声纳系统体积庞大、多波束高分辨成像声纳探测距离短、探测方向单一及应用困难和单波束环扫声纳数据帧率低、覆盖范围小,无法与平台总体共型设计与安装的问题,本发明提供一种水下防碰撞超声多元阵列及障碍检测方法和系统。
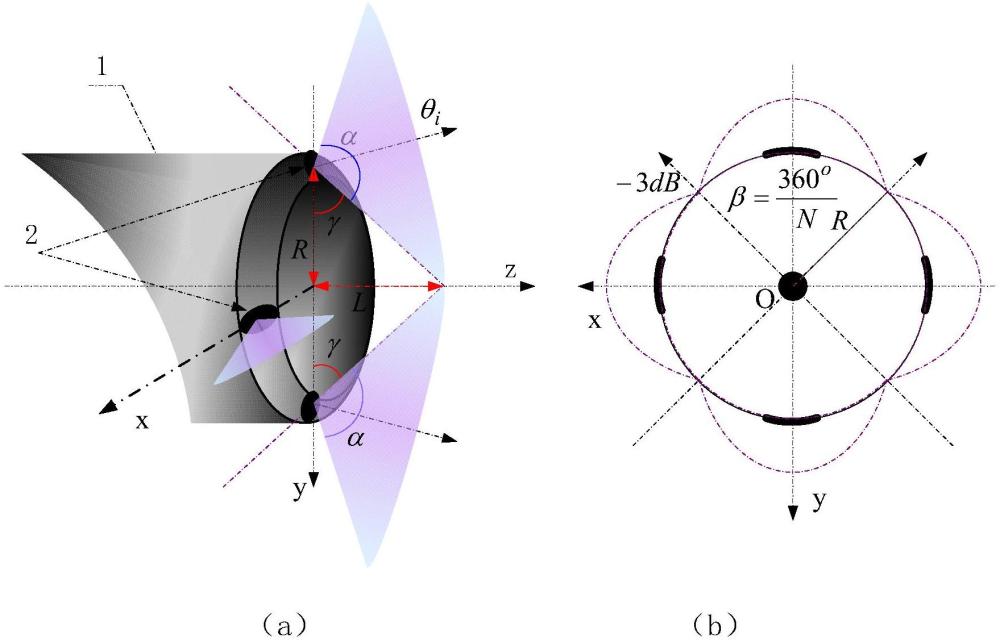
2、一种水下防碰撞超声多元阵列,包括n个超声换能器;所述n个超声换能器沿无人水下航行器艏部的横截面圆周方向均匀设置;n个超声换能器指向性主极大方向的垂直面与无人水下航行器轴向前进方向的夹角均为γ+90°;γ为超声换能器指向性主极大方向的垂直面与无人水下航行器艏部横截面的夹角;所述n个超声换能器沿无人水下航行器艏部的横截面圆周方向设置后,与超声换能器接触的无人水下航行器外壁的横截面中,面积最小的横截面的半径为r;所述超声换能器指向性扇区的水平方位角度宽度为αw,超声换能器指向性扇区的俯仰角度宽度为βw;所述无人水下航行器的盲区距离为l;其中60°≤αw≤180°;
3、超声换能器指向性主极大方向的垂直面与无人水下航行器艏部横截面的夹角γ为:
4、
5、无人水下航行器前进方向覆盖的角度范围为:
6、360°-2{(180°-αw-γ)+90°}=-180°+2(αw+γ) (2)
7、无人水下航行器艏部圆周方向的覆盖角度范围为n×βw=360°,其中
8、βw=360°/n (3)
9、n个超声换能器完成对无人水下航行器艏部圆周方向的覆盖;所述超声换能器阵列中,n的取值为n≥4。
10、更进一步的,当超声换能器阵列中超声换能器设置在无人水下航行器壳体外壁,且超声换能器的指向性主极大方向与无人水下航行器轴向垂直时,将超声换能器阵列中的一个超声换能器设置在无人水下航行器艏部顶点中心位置;
11、此时,设置在无人水下航行器壳体外壁的超声换能器指向性的水平方位角宽度为α′w,设置在无人水下航行器壳体外壁的超声换能器指向性的俯仰角宽度为β′w,设置在无人水下航行器壳体外壁的超声换能器的指向性扇区范围为α′w×β′w,其中,2°≤α′w≤10°;
12、无人水下航行器艏部圆周方向的覆盖角度范围为:α′w×(n-1)β′w,其中:
13、β′w=360°/(n-1) (4);
14、此时,设置在无人水下航行器艏部顶点中心位置的超声换能器指向性扇区的立体角为ψ,无人水下航行器艏部顶点中心位置的超声换能器覆盖的角度范围为:ψ=ψ1×ψ2,ψ1为设置在无人水下航行器艏部顶点中心位置的超声换能器的水平方位角,ψ2为设置在无人水下航行器艏部顶点中心位置的超声换能器的俯仰角;其中20°≤ψ1≤180°,20°≤ψ2≤180°。
15、更进一步的,当超声换能器的指向性主极大方向与无人水下航行器轴向垂直,并将超声换能器阵列中的一个超声换能器设置在无人水下航行器艏部顶点中心位置时,超声换能器阵列中,n的范围为n≥5。
16、更进一步的,一种基于水下防碰撞超声多元阵列的障碍检测方法为平方积分能量检测方法。
17、更进一步的,所述平方积分能量检测方法的具体步骤为:
18、步骤s1:超声换能器阵列采用脉冲体制发射和接收回波;
19、步骤s2:超声换能器阵列根据接收的回波信号分段处理;
20、步骤s3:对每个超声换能器接收信号的平方积分输出进行能量检测,计算障碍物距离和方位。
21、更进一步的,所述步骤s1中超声换能器阵列采用脉冲体制发射和接收回波的步骤为:设n个超声换能器发射的高频窄脉冲为sm(t),m=1,2,...,n,0≤t≤ts,接收的n个通道数据为xm(t),m=1,2,...,n,ts≤t≤t,其中ts是脉冲宽度,t是探测周期,(t-ts)fs是一帧数据长度,fs是采样频率。
22、更进一步的,所述步骤s2中超声换能器阵列根据接收的回波信号分段处理的步骤为:对n个超声换能器接收的数据进行分段处理,在t时刻,第m个换能器接收信号的平方积分输出为ym(t):
23、
24、式中,u是数据段长度,s是回波功率,n0是环境噪声的双边谱功率;取yt=max{ym(t)}为检测统计量。
25、更进一步的,所述步骤s3中对每个超声换能器接收信号的平方积分输出进行能量检测,计算障碍物距离和方位的步骤为:
26、对每个超声换能器接收信号的平方积分输出进行能量检测,当yt的分贝数大于门限dt时,表示有信号,当yt的分贝数小于等于门限dt时,表示无信号;
27、当检测到有信号时,以发射脉冲时刻为参考点,障碍物位置就是回波到达的时延τ;将发射脉冲宽度ts作为修正,则回波到达时延为τ+ts,则障碍物距离为:
28、
29、式中,c是声速;
30、比较n个超声换能器的检测结果,确定检测到信号的超声换能器,检测到信号的超声换能器的指向方向,即为障碍物的方向。
31、更进一步的,一种基于水下防碰撞超声多元阵列的障碍检测方法包括单通道轮流检测模式、多通道同时检测模式和选择通道检测模式;每个超声换能器即为一个通道;
32、所述单通道轮流检测模式为n个超声换能器依次轮流发射信号和接收回波,轮流检测n个通道信号,即对平台前视方向、左右方向、上下方向进行轮流防碰撞检测;
33、所述多通道同时检测模式为n个超声换能器同时发射信号和接收回波,同时检测n个通道信号,即对平台前视方向、左右方向、上下方向同时进行防碰撞检测;
34、所述选择通道检测模式为根据平台拟运动方向信息,选择一个或多个通道信号进行检测。
35、更进一步的,应用一种水下防碰撞超声多元阵列的障碍检测系统包括超声换能器阵列、收发转换模块、功率放大模块、信号调理模块、缓存与dac模块、缓存与adc模块、数字信号处理模块、系统管理与控制模块、数据产生模块和供电模块;
36、数据产生模块与缓存与dac模块连接;缓存与dac模块与功率放大模块连接;功率放大模块与收发转换模块连接;收发转换模块与超声换能器阵列连接;收发转换模块与信号调理模块连接;信号调理模块与缓存与adc模块连接;缓存与adc模块与数字信号处理模块连接;系统管理与控制模块分别与缓存与dac模块和缓存与adc模块连接;供电模块分别与超声换能器阵列、收发转换模块、功率放大模块、信号调理模块、缓存与dac模块、缓存与adc模块、数字信号处理模块、系统管理与控制模块和数据产生模块连接,以提供电力支持。
37、本发明的有益效果是:
38、1、超声换能器倾斜式布阵结构和非倾斜式布阵结构,以较少数目的超声换能器覆盖水下航行器前进、转弯、上浮和下潜等运动方向的角度范围,简化了系统,降低了复杂度,探测距离远,探测范围广,满足无人水下航行器安全航行或作业的防碰撞需求;
39、2、布阵结构简单,体积小:本发明使用khz级的收发合置超声换能器阵列,减小了探测系统的体积和重量,不仅能用于大型水下航行体,也适用于小尺寸的无人水下航行器平台;
40、3、倾斜式布阵结构和非倾斜式布阵结构均可以与前视声纳共存,与前视声纳共同安装时,将设置在水下航行器外壁的超声换能器以倾斜角度安装或将超声换能器设置于前视声纳阵列的空隙中,从而实现共存,不需要改变现有无人水下航行器平台的总体结构以及前视声呐阵列位置,保持了前视声呐的性能,设计安装简单,便于推广,提升了水下航行器的性能;
41、4、倾斜式布阵结构和非倾斜式布阵结构实现了与水下无人航行器的共型安装与设计,覆盖水下航行器前进、转弯、上浮和下潜等运动方向的角度范围:超声换能器贴附于航行器外表面,多个超声换能器与平台总体一体化设计、共型安装,能够保持平台总体流体特性和运动学特性,降低了布阵结构对航行器流体性能的影响;
42、5、超声换能器阵列探测帧率高,避障反馈速度快:本发明采用的khz级的收发合置超声换能器阵列,可发射高频窄脉冲,信号检测时,以超声换能器自身的指向性代替成像声纳的数字波束形成器,省略了m个阵元波束形成器的m次复数乘法和(m-1)次加法运算,仅采用时间信号处理就可以对平台前进、转弯、上浮下潜方向可能存在的障碍物实现快速检测,计算复杂性大大减小,实时性好,避碰预报的数据帧率高。
43、6、超声换能器阵列抗干扰能力、防碰撞检测精度高:采用脉冲体制的主动探测方式,抗干扰能力、防碰撞检测精度高于连续波体制感应障碍物的探测方式,声波在海水中的传播衰减小,声场测量的距离和可靠性均高于光、电、磁等其它物理场,本发明检测盲区小、测距精度高,接收混响小、检测可靠性高。
技术研发人员:冯西安,乔路,赵金虎,薛昱,毕杨,张杨梅
技术所有人:西北工业大学
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除