越野电动车原地起步爬行扭矩控制方法、装置、存储介质及车辆与流程
本发明涉及电动汽车扭矩控制,具体涉及越野电动车原地起步爬行扭矩控制方法、装置、存储介质及车辆。
背景技术:
1、当前,全球各大汽车制造商均聚焦于电动汽车技术的深入研发,乘用车市场中电动汽车的占有率正逐年稳步提升。鉴于这一趋势,越野车领域同样迫切需要开展电动化技术的研发与创新,以满足市场对于高性能、高能效且环保的越野车型日益增长的需求。爬行扭矩控制设计就是越野车需要克服的一大技术难题,即“车辆静止挂d档踩住制动踏板,后松制动踏板,不踩加速度踏板”工况下,此时虽然没有踩制动踏板,但判定驾驶员意图需要加速,车辆有前进动力。
2、越野车现有技术领域中为了解决该问题,往往通过在内燃机越野车设置怠速pid(比例-积分-微分)控制装置。但是这种技术往往是基于怠速发动机扭矩需求从而被动调整爬行扭矩。这种扭矩控制方式往往无法满足驾驶员需求。而电动越野车甚至并没有设计爬行扭矩控制,这也就使得车辆不仅无法理解驾驶员意图,甚至可能无法满足部分情况下的加速需求。
技术实现思路
1、针对现有技术的以上缺陷或改进需求,本发明要解决的是现有技术中爬行扭矩控制的问题。
2、为了实现上述目的,按照本发明的第一方面,提供越野电动车原地起步爬行扭矩控制方法,包括以下步骤:
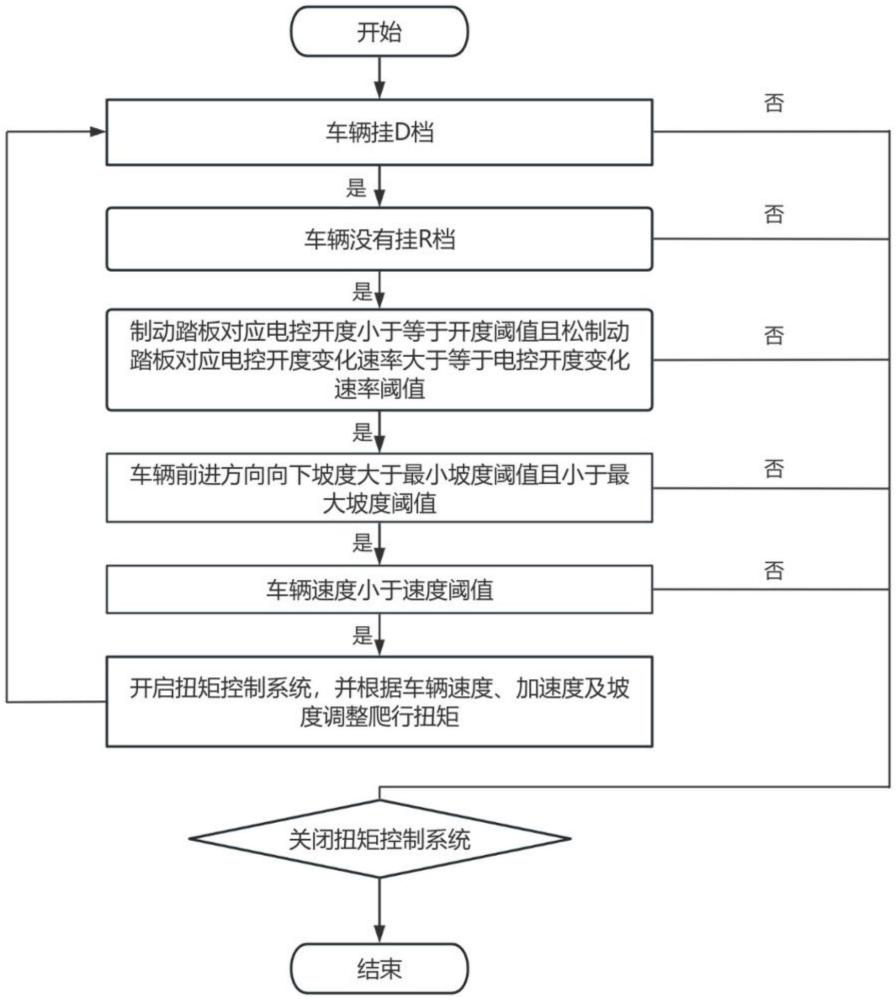
3、s10,依次判断车辆是否满足挂d档、没有挂r档及制动踏板对应电控开度及松制动踏板对应电控开度变化速率是否满足设定阈值范围,如果三个条件中至少有一个不满足,则关闭扭矩控制装置,否则进入s20;
4、s20,依次判断车辆前进方向向下坡度是否满足设定的坡度阈值范围及车辆速度是否小于速度阈值,如果两个条件中至少有一个不满足,则关闭扭矩控制装置,否则进入s30;
5、s30,开启扭矩控制装置,根据车辆速度、加速度及坡度调整爬行扭矩,并再次进入s10。
6、进一步地,所述s10中判断制动踏板对应电控开度及松制动踏板对应电控开度变化速率是否满足设定阈值范围及车辆速度是否小于速度阈值的方法为:
7、通过多次实验,找到制动踏板处于全松临界点时,电控开度θ(t)对应的开度阈值;
8、进行快松制动踏板实验,记录电控开度θ(t)随时间变化的数据,并计算电控开度变化速率v(t):
9、
10、式中,t为某个时间点,δt为测量时间间隔,通过实验结合上述公式的数据,找到进行踏板快松操作时最小变化速率即电控开度变化速率阈值;
11、当制动踏板对应电控开度小于等于开度阈值且松制动踏板对应电控开度变化速率大于等于电控开度变化速率阈值时即为满足设定阈值范围,进入s20。
12、进一步地,所述s20中确定所述设定的坡度阈值的方法为:
13、根据实验获得车辆的起步爬行加速度a:
14、ag=gsin(u);
15、ag≥a;
16、式中,g为重力加速度,u为坡度,ag为重力提供的加速度,当ag大于等于所述车辆的起步爬行加速度a,此时不需要额外的爬行扭矩,得出最大坡度阈值umax;
17、ag≤-a;
18、当坡为反向,因重力产生的加速度反向且大于等于车辆爬行加速度时,此时车辆无法加速,关闭扭矩控制系统,并得出最小坡度阈值umin;因此,当车辆前进方向向下坡度大于最小坡度阈值umin且小于最大坡度阈值umax即为满足设定的坡度阈值范围。
19、进一步地,所述s20中所述速度阈值确定方法为:
20、通过实验获得在不踩加速踏板时,车辆爬行速度范围,并获得最高爬行速度即为速度阈值,当车辆速度小于速度阈值即进入s30中。
21、进一步地,所述s30中根据车辆速度、加速度及坡度调整爬行扭矩的方法为:
22、先考虑车辆速度及加速度计算车辆爬行扭矩:
23、f=ma+f;
24、f=x+yv+zv2;
25、
26、式中,f为轮边驱动力,f为阻力,m为车重,a为起步爬行加速度,x、y及z是阻力f的通过实验测得的计算常量,v为车速,t1为爬行扭矩,r为车轮滚动半径,i为传动比,η为传动效率。
27、进一步地,除了考虑车速和加速度之外,还需要通过坡度对爬行扭矩进行修正:
28、t2=t1-mgsin(u);
29、式中,t2为同时考虑车速、加速度和坡度后得出的修正爬行扭矩,g为重力加速度,u为坡度。
30、按照本发明的第二方面,提供越野电动车原地起步爬行扭矩控制装置,包括:
31、第一主模块:依次判断车辆是否满足挂d档、没有挂r档及刹车踏板对应电控开度及松制动踏板对应电控开度变化速率是否满足设定阈值范围,如果三个条件中至少有一个不满足,则关闭扭矩控制装置,否则进入s20;
32、第二主模块:依次判断车辆前进方向向下坡度是否满足设定的坡度阈值范围及车辆速度是否小于速度阈值,如果两个条件中至少有一个不满足,则关闭扭矩控制装置,否则进入s30;
33、第三主模块:开启扭矩控制装置,并根据车辆速度、加速度及坡度调整爬行扭矩,并再次进入s10。
34、按照本发明的第三方面,还涉及一种计算机存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时,实现所述的越野电动车原地起步爬行扭矩控制方法。
35、按照本发明的第四方面,还涉及一种车辆,包括扭矩控制装置,所述扭矩控制装置用于实施越野电动车原地起步爬行扭矩控制方法。
36、总体而言,通过本发明所构思的以上技术方案与现有技术相比,能够取得下列有益效果:
37、1.本发明提供越野电动车原地起步爬行扭矩控制方法,通过根据车速、车辆起步爬行加速度及坡度,对起步爬行扭矩进行电机扭矩需求控制设计,实现对车辆起步爬行扭矩灵活、准确控制,从而实现扭矩的平滑过渡和精确调节,避免了起步时的顿挫感,提升了驾驶的平顺性和乘客的乘坐舒适性。
38、2.本发明提供越野电动车原地起步爬行扭矩控制方法,通过对车辆档位、车速及坡度等进行检测,实现准确进行场景识别并判断驾驶员需求,从而满足驾驶员不同路况的驾驶需求。
技术特征:
1.越野电动车原地起步爬行扭矩控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的越野电动车原地起步爬行扭矩控制方法,其特征在于,所述s10中判断制动踏板对应电控开度及松制动踏板对应电控开度变化速率是否满足设定阈值范围及车辆速度是否小于速度阈值的方法为:
3.根据权利要求1所述的越野电动车原地起步爬行扭矩控制方法,其特征在于,所述s20中确定所述设定的坡度阈值的方法为:
4.根据权利要求1所述的越野电动车原地起步爬行扭矩控制方法,其特征在于,所述s20中速度阈值确定方法为:
5.根据权利要求4所述的越野电动车原地起步爬行扭矩控制方法,其特征在于,所述s30中根据车辆速度、加速度及坡度调整爬行扭矩的方法为:
6.根据权利要求5所述的越野电动车原地起步爬行扭矩控制方法,其特征在于,除了考虑车速和加速度之外,还需要通过坡度对爬行扭矩进行修正:
7.越野电动车原地起步爬行扭矩控制装置,其特征在于,包括:
8.一种计算机存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时,实现如权利要求1-6任一权利要求所述的越野电动车原地起步爬行扭矩控制方法。
9.一种车辆,其特征在于,包括扭矩控制装置,所述扭矩控制装置用于实施如权利要求1-6任一项所述的方法。
技术总结
本发明公开了越野电动车原地起步爬行扭矩控制方法,具体步骤为:依次判断车辆是否满足挂D档、没有挂R档及刹车踏板对应电控开度及松制动踏板对应电控开度变化速率是否满足设定阈值范围,如果三个条件中至少有一个不满足,则关闭扭矩控制装置,否则进入S20;依次判断车辆前进方向向下坡度是否满足设定的坡度阈值范围及车辆速度是否小于速度阈值,如果两个条件中至少有一个不满足,则关闭扭矩控制装置,否则进入S30;开启扭矩控制装置,根据车辆速度、加速度及坡度调整爬行扭矩,并再次进入S10;还公开了对应装置、存储介质及车辆;实现扭矩的平滑过渡和精确调节,满足驾驶员不同路况的驾驶需求。
技术研发人员:曹晓雨,谢国法,刘威,姚本容,杨细元,王勇,雷本刚,朱运来,段军涛,孟宵
受保护的技术使用者:东风越野车有限公司
技术研发日:
技术公布日:2024/11/14
技术研发人员:曹晓雨,谢国法,刘威,姚本容,杨细元,王勇,雷本刚,朱运来,段军涛,孟宵
技术所有人:东风越野车有限公司
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除