一种长距离隧洞检测机器人的制作方法
本发明涉及机器人,尤其涉及一种长距离隧洞检测机器人。
背景技术:
1、当前水利水电行业有大量超长输水水下隧洞。这些隧洞通常采用断水排空后人工检测。检测期间影响供水,且检测费用较贵。采用水下机器人检测可实现不排空。但常规水下机器人行走距离有限,很难到达数公里甚至上十公里的水下隧洞检测需求。
2、现有技术存在诸多缺陷与不足,如:
3、1、采用外部供电模式,机器人要拖带供电电缆进入隧洞。长距离行走机器人拖带线缆力量有限,无法行走太远;
4、2、机器人采用开架模式,水下阻力较大;
5、3、采用无缆模式机器人水下检测无法实时获取数据并控制机器人,检测风险大;
6、4、机器人的视觉系统部不采用环形360度全覆盖,不适合隧洞环形结构的检测。
7、为此,我们提出了一种长距离隧洞检测机器人。
技术实现思路
1、本发明的目的在于提供一种长距离隧洞检测机器人,以克服现有技术中存在的技术问题。
2、为实现上述技术目的,达到上述技术效果,本发明提供如下技术方案:
3、一种长距离隧洞检测机器人,包括保护架,所述保护架的前端连接有引流罩,所述引流罩的前端连接有前摄像系统、图像声呐与隧洞声呐,所述保护架的后端连接有机器人稳定翼。
4、优选的,一种长距离隧洞检测机器人中,所述引流罩采用流线型外观结构,所述前摄像系统、图像声呐与隧洞声呐均包裹在型线以内。
5、优选的,一种长距离隧洞检测机器人中,所述机器人稳定翼采用可变角度结构。
6、优选的,一种长距离隧洞检测机器人中,所述引流罩的后方设有内置度环形摄像系统。
7、优选的,一种长距离隧洞检测机器人中,所述保护架的外壁前后分别连接有前避碰万向轮和后避碰万向轮。
8、优选的,一种长距离隧洞检测机器人中,所述保护架的内腔前侧安装有前水平推进器与前垂直推进器,所述保护架的内腔后侧安装有后水平推进器与主推进器。
9、优选的,一种长距离隧洞检测机器人中,所述保护架的内腔中部连接有快速更换电池模块。
10、优选的,一种长距离隧洞检测机器人中,所述保护架的后端设有远程控制微细光纤系统,所述远程控制微细光纤系统采用内置两根单模光纤、外部有凯夫拉加强、并在水下为零浮力的线缆结构。
11、优选的,一种长距离隧洞检测机器人中,所述保护架的顶部可拆卸安装有光纤转换控制盒。
12、本发明的有益效果是:
13、1、本发明结构设计合理,机器人采用可快速更换自带电池方式,不需要外部供电,通过微细的光纤和隧洞进行通讯联系,机器人拖带线缆助力小,距离远;
14、2、本发明中机器人采用细长体结构,迎流面小,最水阻力小。采用模块结构,机器人内部空间利用充分;
15、3、本发明中机器人采用两根单模微细光纤与洞外控制台连接,水下摄像数据、声呐数据实时传输到水面,水面操作人员实时控制机器人行走,发现有隧洞缺陷时可实时停下来进一步检查;
16、4、本发明中机器人采用内置式环形360视觉,无论机器人在隧洞那个位置均能看到洞壁。
技术特征:
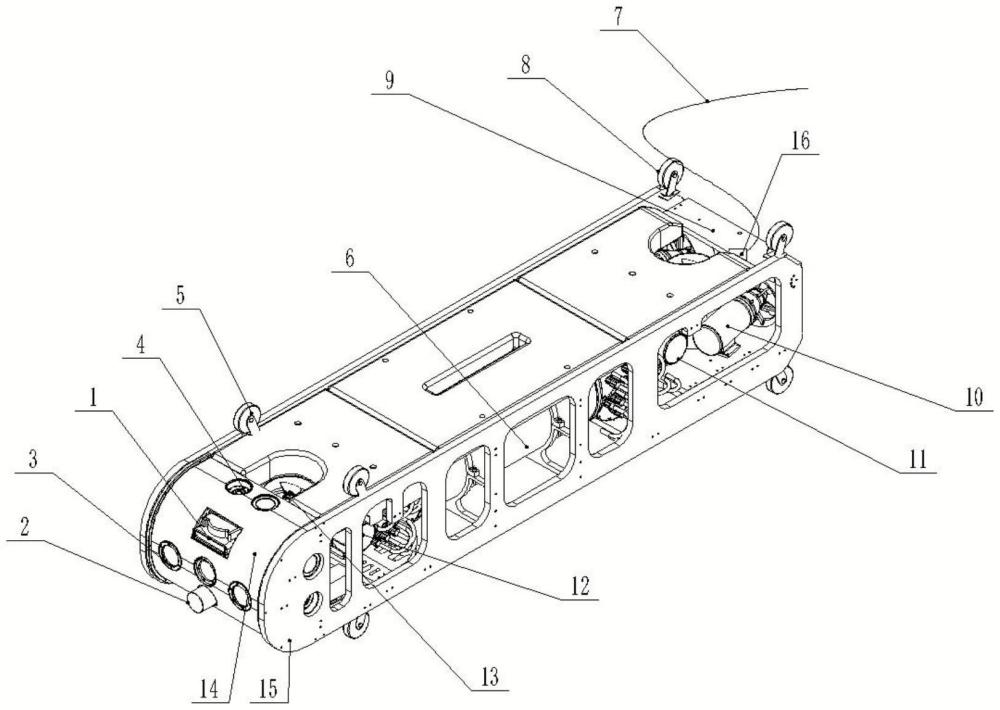
1.一种长距离隧洞检测机器人,包括保护架(15),其特征在于:所述保护架(15)的前端连接有引流罩(14),所述引流罩(14)的前端连接有前摄像系统(3)、图像声呐(1)与隧洞声呐(2),所述保护架(15)的后端连接有机器人稳定翼(9)。
2.根据权利要求1所述的一种长距离隧洞检测机器人,其特征在于:所述引流罩(14)采用流线型外观结构,所述前摄像系统(3)、图像声呐(1)与隧洞声呐(2)均包裹在型线以内。
3.根据权利要求1所述的一种长距离隧洞检测机器人,其特征在于:所述机器人稳定翼(9)采用可变角度结构。
4.根据权利要求1所述的一种长距离隧洞检测机器人,其特征在于:所述引流罩(14)的后方设有内置360度环形摄像系统(4)。
5.根据权利要求1所述的一种长距离隧洞检测机器人,其特征在于:所述保护架(15)的外壁前后分别连接有前避碰万向轮(5)和后避碰万向轮(8)。
6.根据权利要求1所述的一种长距离隧洞检测机器人,其特征在于:所述保护架(15)的内腔前侧安装有前水平推进器(12)与前垂直推进器(13),所述保护架(15)的内腔后侧安装有后水平推进器(11)与主推进器(10)。
7.根据权利要求1所述的一种长距离隧洞检测机器人,其特征在于:所述保护架(15)的内腔中部连接有快速更换电池模块(6)。
8.根据权利要求1所述的一种长距离隧洞检测机器人,其特征在于:所述保护架(15)的后端设有远程控制微细光纤系统(7),所述远程控制微细光纤系统(7)采用内置两根单模光纤、外部有凯夫拉加强、并在水下为零浮力的线缆结构。
9.根据权利要求1所述的一种长距离隧洞检测机器人,其特征在于:所述保护架(15)的顶部可拆卸安装有光纤转换控制盒(16)。
技术总结
本发明公布了一种长距离隧洞检测机器人,包括保护架,所述保护架的前端连接有引流罩,所述引流罩的前端连接有前摄像系统、图像声呐与隧洞声呐,所述保护架的后端连接有机器人稳定翼;本发明结构设计合理,机器人采用可快速更换自带电池方式,不需要外部供电,通过微细的光纤和隧洞进行通讯联系,机器人拖带线缆助力小,距离远。
技术研发人员:胡勇,罗飞龙,许松,方福东,袁海光,杨启
受保护的技术使用者:上海交大海洋水下工程科学研究院有限公司
技术研发日:
技术公布日:2024/11/14
技术研发人员:胡勇,罗飞龙,许松,方福东,袁海光,杨启
技术所有人:上海交大海洋水下工程科学研究院有限公司
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除