自适应多直径锁定打捞装置及打捞方法与流程
本发明涉及打捞,具体的,涉及自适应多直径锁定打捞装置及打捞方法。
背景技术:
1、自适应多直径锁定打捞装置是一种用于海洋工程、石油和天然气开采等领域的高科技打捞工具。这种装置的设计允许它适应不同直径的钻杆或管道,从而在水下环境中进行有效的打捞作业。随着海洋资源的不断开发,水下作业变得越来越频繁。在这些作业中,钻杆、管道或其他设备会因为各种原因损坏或脱落,需要一种可靠的打捞工具来恢复这些设备。传统的打捞工具往往设计固定,只能适应特定直径的钻杆或管道。这限制了它们的应用范围,并且在面对不同直径的设备时,导致面对不同直径的孔洞需要不同的打捞工具。
技术实现思路
1、本发明提出自适应多直径锁定打捞装置及打捞方法,解决了相关技术中传统的打捞工具往往设计固定,只能适应特定直径的钻杆或管道的问题。
2、本发明的技术方案如下:
3、自适应多直径锁定打捞装置,包括:
4、安装件;
5、夹持组件,所述夹持组件移动设置在所述安装件上,所述夹持组件包括:
6、夹持板,所述夹持板具有两个,两个所述夹持板均滑动设置在所述安装件上,两个所述夹持板形成夹持间隙,两个所述夹持板在所述安装件上滑动后,用于调节所述夹持间隙的大小,所述夹持板具有若干个滑动间隙;
7、夹持块,所述夹持块具有若干个,若干个所述夹持块分别滑动设置在若干个所述滑动间隙内,且若干个所述夹持块对称分布,所述夹持块在所述滑动间隙内滑动后,用于调整所述夹持间隙的大小;
8、同步驱动组件,所述同步驱动组件设置所述夹持板上,所述同步驱动组件用于带动若干个所述夹持块同步移动。
9、可选的,所述夹持板具有若干个导向槽,所述同步驱动组件包括:
10、导向杆,所述导向杆具有若干个,若干个所述导向杆一一对应的设置在所述夹持块上,且若干个导向杆一一对应的滑动设置在所述导向槽内;
11、第一齿条,所述第一齿条具有若干个,若干个所述第一齿条均设置在所述导向杆上,且滑动设置在所述安装件上,所述导向杆在所述导向槽内滑动后,用与带动所述第一齿条在所述安装件上滑动;
12、弧形齿,所述弧形齿具有若干个,所述弧形齿具有铰接端,若干个所述弧形齿均通过所述铰接端铰接设置在所述安装件上,且若干个所述弧形齿均一一对应的和若干个所述第一齿条啮合,所述弧形齿在所述安装件上转动后,用于带动所述第一齿条在所述安装件上滑动;
13、驱动件,设置在所述安装件上,所述驱动件用于驱动若干个所述弧形齿同步转动。
14、可选的,还包括:
15、罩板,设置在所述安装件上,所述罩板用于罩设所述同步驱动组件;
16、所述弧形齿具有摆动端,所述驱动件包括:
17、升降板,所述升降板移动设置在所述安装件上,且所述升降板在所述安装件上的移动方向和所述第一齿条的滑动方向垂直,若干个所述弧形齿的所述摆动端均铰接设置在所述升降板上,所述升降板在所述安装件上移动后,用于带动若干个所述弧形齿绕所述铰接端转动;
18、伸缩件,所述伸缩件设置在所述罩板内壁,所述伸缩件的伸缩端设置在所述升降板上,所述伸缩件伸缩后,用于带动所述升降板移动。
19、可选的,还包括:
20、升降装置,所述升降装置设置在所述安装件上,所述升降装置用于带动所述安装件升降。
21、可选的,所述升降装置包括:
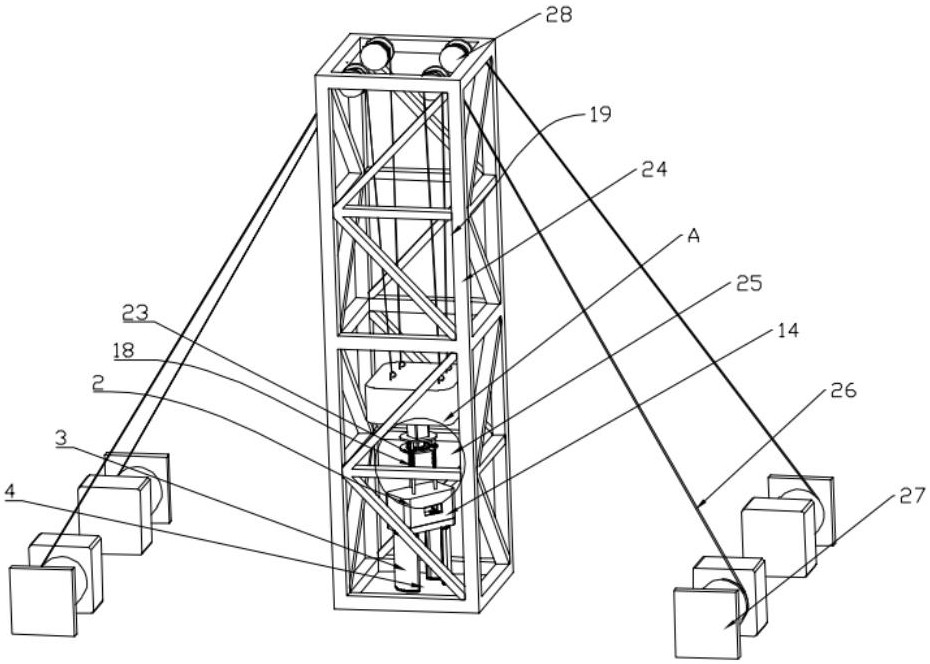
22、机架,所述机架用于设置在平台上;
23、第一安装板,所述第一安装板设置在所述机架上;
24、第一齿轮,所述第一齿轮转动设置在所述第一安装板上;
25、第二齿轮,所述第二齿轮具有若干个,若干个所述第二齿轮均转动设置在所述第一安装板上,且若干个所述第二齿轮圆周分布在所述第一齿轮外侧,若干个所述第二齿轮均和所述第一齿轮啮合;
26、螺纹杆,所述螺纹杆具有若干个,若干个所述螺纹杆均一端设置在所述罩板上,另一端螺纹设置在若干个所述第二齿轮上,若干个所述第二齿轮转动后,用于带动若干个所述螺纹杆进行升降。
27、可选的,所述机架包括:
28、安装架,所述安装架用于设置在平台上,所述安装架具有安装间隙,且所述夹持组件位于所述安装间隙内;
29、还包括:
30、牵拉绳,所述牵拉绳具有若干个,若干个所述牵拉绳一端均间隔的设置在所述第一安装板上;
31、卷扬机,所述卷扬机具有若干个,若干个所述卷扬机均用于设置在所述平台上,且所述牵拉绳另一端绕设在所述卷扬机上,所述牵拉绳在所述卷扬机上绕设后,用于带动所述第一安装板移动。
32、可选的,还包括:
33、绕设轮,所述绕设轮具有若干个,若干个所述绕设轮均设置在所述安装架上,所述绕设轮用于给所述牵拉绳导向。
34、可选的,还包括:
35、第二齿条,所述第二齿条设置在所述安装件上;
36、第三齿轮,具有若干个,若干个所述第三齿轮分别转动设置在两个夹持板上,所述第三齿轮转动后,用于带动两个夹持板相互靠近或远离。
37、一种自适应多直径锁定打捞方法,使用任一项所述的自适应多直径锁定打捞装置。
38、可选的,包括以下步骤:
39、s1、调平安装:将机架的安装架设置在平台上,并调节安装架的水平度,确保整个装置稳定;
40、s2、下探:通过卷扬机下放牵拉绳和夹持组件并识别,对钻杆进行定位;
41、s3、微调夹持组件:驱动第一齿轮旋转,进而带动第二齿轮同步转动。第二齿轮与螺纹杆的螺纹啮合,实现螺纹杆的线性下降运动,使夹持组件完全对准目标钻杆;
42、s4、第二打捞动作:操作第三齿轮转动,促使两个夹持板执行闭合动作,对钻杆进行初步夹持。若钻杆被成功夹紧,启动第一齿轮反向旋转,提升打捞装置。若夹持失败,表明钻杆直径小于夹持板开口,此时伸缩件启动,带动升降板沿垂直于第一齿条滑动方向移动,进而驱动弧形齿绕铰接端转动,弧形齿与第一齿条的啮合作用,促使齿条沿导向槽移动,带动夹持块在滑动间隙内同步移动,实现对钻杆的精确夹持;
43、s5、起升:确认钻杆被夹持组件稳固夹紧后,再次操作第三齿轮,驱动钻杆沿螺纹杆进行上升运动,钻杆被提升至指定高度后,通过卷扬机收卷牵拉绳操作,将钻杆提升至平台,完成单次打捞循环。
44、本发明的工作原理及有益效果为:
45、本发明中,首先将自适应多直径锁定打捞装置安装到相应的船上的作业平台上。使用水下摄像头或其他传感器设备识别需要打捞的目标物体,并确定其直径。根据目标物体的直径,操作同步驱动组件,使夹持板和夹持块移动到适当的位置,形成合适的夹持间隙。将装置移动至目标物体上方,通过同步驱动组件控制夹持块同步向内移动,逐渐减小夹持间隙,直至夹持块牢固地锁定目标物体。在进行打捞前,检查夹持块是否均匀分布且夹持力度适中,确保目标物体被安全锁定。确认一切就绪后,启动打捞装置,将目标物体从水下提升至水面。打捞完成后,将装置回收并进行必要的检查和维护,确保其再次使用时的性能。装置能够适应不同直径的钻杆或管道,通过调节夹持间隙的大小,实现对不同直径目标的稳定夹持。夹持板和夹持块的滑动设置提供了灵活性,允许装置在不改变自身结构的情况下,适应不同直径的打捞需求。通过夹持块在滑动间隙内的移动,可以精确调整夹持间隙,确保对目标物体的紧固力度适中,避免损伤。夹持块的对称分布设计有助于保持打捞过程中的平衡,减少因力量不均导致的设备损伤或打捞失败。同步驱动组件确保所有夹持块能够同时移动,提高了调节速度和效率,同时保证了夹持动作的一致性。
技术研发人员:王茂甡,王恩泽
技术所有人:青岛滨海勘察测绘有限公司
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除