无人机的路径规划方法、装置和计算机程序产品与流程
本申请涉及电力巡检,具体而言,涉及一种无人机的路径规划方法、装置、计算机可读存储介质和计算机程序产品。
背景技术:
1、在电力系统中,输电系统的运维是重要的工作。目前常常通过人工现场操控无人机来完成电力巡检工作,但是,随着巡视需求不断增大,人工操控无人机的路径的方式耗时耗力,规划的巡检路径很难符合巡检需求。
技术实现思路
1、本申请的主要目的在于提供一种无人机的路径规划方法、装置、计算机可读存储介质和计算机程序产品,以至少解决现有技术中人工操控无人机的路径的方式耗时耗力,规划的巡检路径很难符合巡检需求的问题。
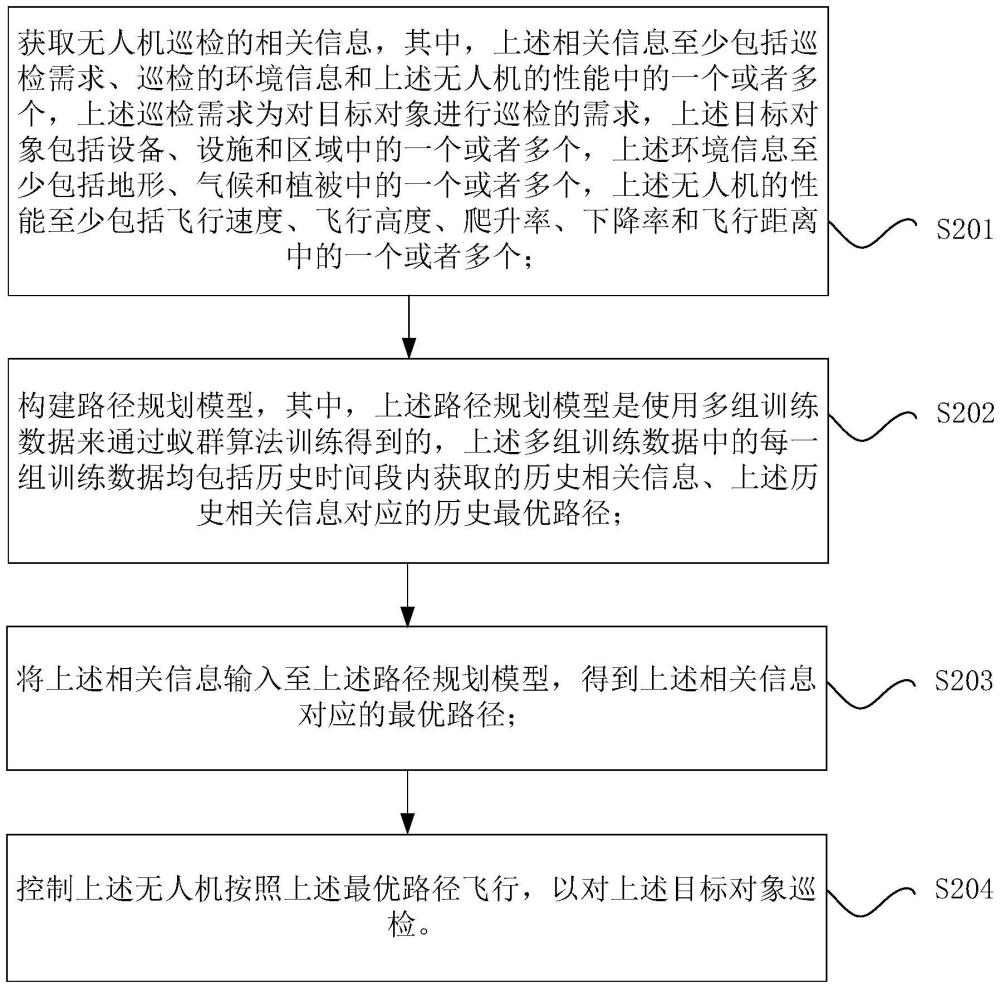
2、为了实现上述目的,根据本申请的一个方面,提供了一种无人机的路径规划方法,包括:获取无人机巡检的相关信息,其中,所述相关信息至少包括巡检需求、巡检的环境信息和所述无人机的性能中的一个或者多个,所述巡检需求为对目标对象进行巡检的需求,所述目标对象包括设备、设施和区域中的一个或者多个,所述环境信息至少包括地形、气候和植被中的一个或者多个,所述无人机的性能至少包括飞行速度、飞行高度、爬升率、下降率和飞行距离中的一个或者多个;构建路径规划模型,其中,所述路径规划模型是使用多组训练数据来通过蚁群算法训练得到的,所述多组训练数据中的每一组训练数据均包括历史时间段内获取的历史相关信息、所述历史相关信息对应的历史最优路径;将所述相关信息输入至所述路径规划模型,得到所述相关信息对应的最优路径;控制所述无人机按照所述最优路径飞行,以对所述目标对象巡检。
3、可选地,在获取无人机巡检的相关信息之后,所述方法还包括:基于所述巡检需求,获取待巡检的所述目标对象的空间分布特征信息,其中,所述空间分布特征信息至少包括位置分布信息、形态特征分布信息和拓扑关系信息中的一个或者多个,所述位置分布信息为所述目标对象所处的位置,所述形态特征分布信息为所述目标对象的形状的特征,所述拓扑关系信息为多个所述目标对象之间的距离关系;根据所述空间分布特征信息对待巡检的所述目标对象进行分类,得到分类结果。
4、可选地,在获取无人机巡检的相关信息之后,所述方法还包括:获取关键航迹点,其中,所述关键航迹点为所述巡检需求中预先设置的航迹点;获取静态障碍物对应的避障点,其中,所述避障点为待巡检的所述目标对象中的静态的障碍物到的位置点;至少根据所述关键航迹点和所述避障点,构建三维模型。
5、可选地,在构建路径规划模型之前,所述方法还包括:获取待巡检的所述目标对象的特征图,其中,所述特征图为基于点云特征和颜色梯度的直方图;根据目标公式对所述特征图进行滤波融合,得到响应图,其中,所述响应图用于表征滤波器在不同的所述特征图的响应程度,所述目标公式为:
6、f′(x)=∑i=1αi×fi(x),
7、f′(x)表示所述响应图,αi表示第i个所述特征图的权重,fi(x)表示第i个所述特征图,
8、
9、ki表示第i个滤波响应的峰值,ki=max(fi(x)),kj表示j个滤波响应的峰值,kj=max(fj(x)),n表示所述特征图的数量。
10、可选地,在构建路径规划模型之前,所述方法还包括:初始化种群,随机放置m只蚂蚁,m≥2,其中,每只所述蚂蚁行走的路线表示所述无人机的巡检路径;采用所述相关信息,确定所述蚂蚁下一次的移动位置;在所有的所述蚂蚁都已到达巡检终点的情况下,获取迭代过程中的最优解,得到所述最优路径。
11、可选地,在将所述相关信息输入至所述路径规划模型,得到所述相关信息对应的最优路径之后,所述方法还包括:控制所述无人机按照所述最优路径飞行,并实时获取巡检过程中的所述最优路径的影像数据;对所述影像数据进行图像分析,确定所述无人机的所述最优路径上是否存在动态障碍物,得到动态检测结果。
12、可选地,在对所述影像数据进行图像分析,确定所述无人机的所述最优路径上是否存在动态障碍物,得到动态检测结果之后,所述方法还包括:获取所述动态障碍物的障碍信息,其中,所述障碍信息至少包括所述动态障碍物的位置、所述动态障碍物的飞行轨迹、所述动态障碍物的与所述最优路径的重合信息中的一个或者多个;根据所述障碍信息生成避障路线,并控制所述无人机按照所述避障路线飞行;在所述无人机已通过所述动态障碍物的情况下,控制所述无人机回归到所述最优路径飞行。
13、根据本申请的另一方面,提供了一种无人机的路径规划装置,包括:第一获取单元,用于获取无人机巡检的相关信息,其中,所述相关信息至少包括巡检需求、巡检的环境信息和所述无人机的性能中的一个或者多个,所述巡检需求为对目标对象进行巡检的需求,所述目标对象包括设备、设施和区域中的一个或者多个,所述环境信息至少包括地形、气候和植被中的一个或者多个,所述无人机的性能至少包括飞行速度、飞行高度、爬升率、下降率和飞行距离中的一个或者多个;第一构建单元,用于构建路径规划模型,其中,所述路径规划模型是使用多组训练数据来通过蚁群算法训练得到的,所述多组训练数据中的每一组训练数据均包括历史时间段内获取的历史相关信息、所述历史相关信息对应的历史最优路径;第一处理单元,用于将所述相关信息输入至所述路径规划模型,得到所述相关信息对应的最优路径;第一控制单元,用于控制所述无人机按照所述最优路径飞行,以对所述目标对象巡检。
14、根据本申请的再一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质包括存储的程序,其中,在所述程序运行时控制所述计算机可读存储介质所在设备执行任意一种所述无人机的路径规划方法。
15、根据本申请的又一方面,提供了一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现任意一种所述无人机的路径规划方法的步骤。
16、应用本申请的技术方案,采用蚁群算法来对无人机的巡检路径进行规划,蚁群算法具有自适应性,可以根据环境的变化实时调整路径规划,适应不同的情况和要求,蚁群算法是一种启发式算法,可以在较短的时间内找到较优的路径规划,进而使得规划的巡检路径符合巡检需求,可以提高无人机巡检的效率。
技术特征:
1.一种无人机的路径规划方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,在获取无人机巡检的相关信息之后,所述方法还包括:
3.根据权利要求1所述的方法,其特征在于,在获取无人机巡检的相关信息之后,所述方法还包括:
4.根据权利要求1所述的方法,其特征在于,在构建路径规划模型之前,所述方法还包括:
5.根据权利要求1所述的方法,其特征在于,在构建路径规划模型之前,所述方法还包括:
6.根据权利要求1所述的方法,其特征在于,在将所述相关信息输入至所述路径规划模型,得到所述相关信息对应的最优路径之后,所述方法还包括:
7.根据权利要求6所述的方法,其特征在于,在对所述影像数据进行图像分析,确定所述无人机的所述最优路径上是否存在动态障碍物,得到动态检测结果之后,所述方法还包括:
8.一种无人机的路径规划装置,其特征在于,包括:
9.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质包括存储的程序,其中,在所述程序运行时控制所述计算机可读存储介质所在设备执行权利要求1至7中任意一项所述无人机的路径规划方法。
10.一种计算机程序产品,包括计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至7中任意一项所述无人机的路径规划方法的步骤。
技术总结
本申请提供了一种无人机的路径规划方法、装置和计算机程序产品。该方法包括:获取无人机巡检的相关信息;构建路径规划模型,其中,路径规划模型是使用多组训练数据来通过蚁群算法训练得到的,多组训练数据中的每一组训练数据均包括历史时间段内获取的历史相关信息、历史相关信息对应的历史最优路径;将相关信息输入至路径规划模型,得到相关信息对应的最优路径;控制无人机按照最优路径飞行,以对目标对象巡检。该方案解决了现有技术中人工操控无人机的路径的方式耗时耗力,规划的巡检路径很难符合巡检需求的问题。
技术研发人员:陈正伦,叶家洪,章军,莫雄心,庄毅,林明伟,陈文勇,李锦纯,陈嘉琪,廖杰锋,吴家栋,邓天阳,梁家明
受保护的技术使用者:广东电网有限责任公司云浮供电局
技术研发日:
技术公布日:2024/11/18
技术研发人员:陈正伦,叶家洪,章军,莫雄心,庄毅,林明伟,陈文勇,李锦纯,陈嘉琪,廖杰锋,吴家栋,邓天阳,梁家明
技术所有人:广东电网有限责任公司云浮供电局
备 注:该技术已申请专利,仅供学习研究,如用于商业用途,请联系技术所有人。
声 明 :此信息收集于网络,如果你是此专利的发明人不想本网站收录此信息请联系我们,我们会在第一时间删除